Guidelines for developing a Tango Device Server#
This chapter describes guidelines for developing device servers. The Tango Device Server Model is flexible and permits different interpretations of how to implement Device Servers, however there is a recommended way of using Tango to implement device servers. This chapter will document some of the best practices from experienced developers for device development.
This chapter focuses on:
Device Server design consideration
Implementation good practices
These guidelines apply to features available in Tango v8 or higher.
Tango Concepts#
Some understanding of the basic Tango concepts is required to make use of this tutorial. Please refer to the Explanation section if further information on these concepts is required.
Tango Device Design#
Elements of general design#
Reusability#
In a Tango control system, each device is a software component and potentially reusable.
It is necessary to:
Systematically evaluate prior to the coding of a device, the possibility of reusing a device available in the code repositories (Tango Controls community, local repository), in order to avoid several implementations of the same equipment.
Design the device to be as reusable/extensible as possible because it may interest other developers in the community.
Generic interface programming#
The device must be as generic as possible which means the definition of its interface should:
Reflect the service rather than its underlying implementation. For example, a command named
WriteReadreflects the communication service of a bus (type: message exchange), while a command namedNI488_Sendreflects a specific implementation of the supplier.Show the general characteristics (attributes and commands) of a common type of equipment that it represents. For example, a command
Onreflects the action of powering on a PowerSupply , while a command namedBruckerPSONreflects a specific implementation which must be avoided.
The device interface must be service oriented, and not implementation oriented.
Abstract interfaces#
Singleton device#
Tango allows a device server to host several devices which are instantiations of the same Tango class.
However, in particular cases some technical constraints may forbid this.
In such a case, the Device Server programmer should anticipate
this in the device design phase and add, for example, a static variable
to count device instances and detect this misconfiguration. For
example, it can authorize the creation of a second instance (within the
meaning of the device creation) but systematically put the state to
FAULT (in the method init_device) and indicate the problem in the
Status.
In the case where technical constraints prohibit the deployment of multiple instances of a Tango device within the same device server, the developer has to ensure that only one instance can be created and inform the user with a clear message in case more than one device is configured in the database.
Device states#
When designing the device, you should clearly define the state machine that will reflect the different states in which the device can be, and also the associated transitions.
The state machine must follow these rules:
At any time, the device state must reflect the internal state of the system it represents.
The state should represent any change made by a client’s request.
The device behaviour is specified and documented.
Device interface definition#
A Tango Device must be “self-consistent”. In the case where it represents a subset of the control system, it must enable access to all of the associated features (unless otherwise specified). The limit of its “responsibilities”, meaning “separation of concerns”, is clearly defined: 1 Device = 1 microservice = 1 element of the system. The analogy with object-oriented programming is straightforward.
A Device is a microservice made available to any number of unspecified clients. Its implementation and/or behaviour must not make assumptions about the nature and the number of its potential clients. In all cases, reactivity must be ensured (i.e. the response time of the device must be minimised).
The first step in designing a device is to define the commands and the attributes using Pogo (use Pogo to define the Tango interface).
Except in (very) particular cases, always use an attribute to expose the data produced by the device. The command concept exists (see Device Commands ) but its use as an attribute substitute is prohibited. For example, a motor must be moved by writing its associated ‘position’ attribute instead of using a ‘GotoPosition’ command.
The choice will be made following these rules:
Attribute: used for all values that are presented to the “client”. It is imperative to use the attributes and to not use Tango commands that would act like a get/set couple.
Command: used for every action. In most cases this is a void-void type.
Any deviation from these rules must be justified in the description of the attribute or command.
Service availability#
From the operator’s perspective, the “response time” or “reactivity” (i.e. the device is always responsive) is the reference metric to describe the performance of a device. Ideally, the device implementation must ensure the service availability regardless of the external client load or the internal load. For the end user, it is always very unpleasant to suffer a Tango timeout and receive an exception instead of the expected response.
The response time of the device should be minimised and in all cases it should be lower than the default Tango timeout of 3 seconds.
If the action to be performed takes longer than that, execution should be done asynchronously in the Tango class and its progress reported in the state/status.
Several technical solutions are available to the device developer to ensure service availability:
Use the Tango polling mechanism,
Use a threading mechanism, managed by the developer.
Tango polling mechanism#
Polling interest#
The polling mechanism is detailed in the Tango documentation Device Polling .
Tango implements a mechanism called polling which alleviates the problem of equipment response time (which is usually the weak point in terms of performance). The response time of a GPIB link or a RS-232 link is usually one to two orders of magnitude higher than the performance of the Tango code executed by a client request.
Polling limitations#
From the perspective of the device activity, the polling is in direct competition with client requests. The client load is therefore competing with the polling activity.
This means that any polling activity has to be tuned in order to keep some free time for the device to answer client requests. Do not try to poll a device object with a polling period of 200 ms if the object access time is 300 ms (even if Tango implements some algorithm to minimize the bad behavior of such badly tuned polling).
For polled Tango device objects (attribute or command), client reading does not generate any activity on the device whatever the number of clients. The data are returned from the so-called polling buffer instead of coming from the device itself. Therefore, an obvious rule is to poll the key device object (state attribute, pressure attribute for a vacuum valve…).
The recommendation for device polling tuning is to keep the device free 40% of time.
Let’s take an example: for a power supply device, you want to poll the device state and its current attribute, which for such a device are the device key objects.
State access needs 100 ms while current attribute reading needs 50 ms.
Because, you want to poll these two objects, the time required on the device by the polling mechanism will be 150 ms (100 + 50).
In order to keep the 40% ratio, tune the polling period for this device to 250 ms.
The device is then occupied by the polling mechanism during 150 ms (60 %) but free for other client activity for 100 ms (40 %).
Device polling is easily tunable at run time using the Jive and/or Astor Tango tools.
Threading mechanism#
Threading is another possible solution for the load problem as a thread (managed by the device developer) supports communication with the material (polling or other) and the data obtained are put in the “cache”. You can now produce the “last known value” to the client at any time and optimize the response time. This approach, however, has a limit as it is necessary to reread the value of the hardware to assure clients that the returned value is the system “current state”.
For a C++ device, the implementation of a threading mechanism can be done via the DeviceTask class from the Yat4Tango library. This class owns a thread associated with a FIFO message list. Processing messages can be synchronous or asynchronous.
See a complete C++ example of this in the AttributeSequenceWriter.
If the design of the Tango class requires threading, follow these rules:
if it requires a simple thread, in C++ the recommendation is to use a C++11 thread,
if it requires an acquisition thread with message exchanges then in C++ the recommendation is to use the
Yat4Tango::DeviceTaskclass.
Tango device implementation#
General rules#
Language#
The Tango Controls community is international and the code can be shared with the community, so it is recommended to use English for documenting a device development.
English will be used for:
The interfaces definition (attributes and commands),
The device documentation (online help for command usage and attributes description),
The comments inserted in the code by the developer,
The error messages,
The name of variables and internal methods added by the developer.
The choice of the language used for the user’s documentation of the device server (“Device Server User’s Guide”) is left free, to focus on the editorial quality. In the case of a joint development with another institute, English will be used.
Types#
The types used for the device interface definition are Tango types
(Tango::DevDouble, Tango::DevFloat …). These types are presented by Pogo
and are not modifiable.
The types used by the developer in their own code are left free to choose as long as they are not platform specific. Standard types of the language used (Boolean, int, double …), Tango types or types from a common library (Yat, Yat4Tango for C++) can potentially be used.
Direct conversions from the C++ type long to Tango::DevLong are only
supported on 32-bit platforms and should be avoided.
Generated code#
The automatically generated code by Pogo must not be modified by the developer.
The developer must include their own code in the specified “PROTECTED REGION” parts.
Device interface#
Naming rules#
Having homogeneous conventions for naming attributes, commands and properties is a good way to promote the reuse of device servers inside the Tango collaboration.
It makes the development carried out by another institute easier to understand and integrate into another Control System.
Class name#
The Tango class name is obtained by concatenating the fields that it is compose of – each field beginning with a capital letter:
Eg : MyDeviceClass
Device attributes#
The device command and attribute names must be explicit and should enable a quick understanding of the nature of the attribute or the command.
Eg: for a power supply, you would have an attribute
outputCurrent(not OC1) or a commandActivateOutput1(not ActO1).
The nomenclature recommendations are detailed in the section Naming Rules .
Device Commands#
The recommendations are the same as those proposed for an attribute, except for the first letter of the name.
Device properties#
The recommendations are the same as those proposed for a command.
Device attributes nomenclature#
It is a good practice that a particular signal type is always named in a similar way in various device servers.
For example the intensity of a current should always be named
intensity (and not “intens”,
“current”,”I” depending on
the device server).
This allows the user to quickly make the link between the software information and the physical sensor and reciprocally.
Data types choice#
Always use data types consistent with the underlying information.
Unsigned integer must be used for the physical quantities that are suitable.
Eg: A number of samples
numSamples, where negative values have no meaning, will be aTango::DevULong(unsigned integer 32 bits) and not aTango::DevLong(signed integer 32 bits).Similarly, in such a case, the use of a floating point number should be prohibited as non-integer values also have no meaning in this context.s
This rule is also applicable to input/output arguments of commands.
Interface level choice#
The choice between the Expert or the Operator level for an interface must be thought through.
Only necessary commands for a nominal control of the equipment must be accessible at the Operator level. The commands for fine control of the equipment (eg: metrology, maintenance, unit test) must only be accessible at the Expert level.
Pogo use#
Device generation#
The use of Pogo is mandatory for creating or modifying the device interface.
Tango is constantly evolving but this tool will support all or part of the porting associated to the kernel and the consequences on the IDL interface.
In addition, it simplifies maintenance/development operations.
Every command, attribute, property or device state must be fully documented; this documentation is done via the Pogo tool.
When creating an attribute with Pogo, the entire configuration of the attribute must be fully filled in by the developer (maximum possible) to avoid ambiguities.
Similarly, the states and their transitions must be described with precision and clarity.
In fact:
In operation, this documentation will be the reference for understanding the device behaviour. Remember that the operator will have this information with the generic tools (like Test Device from Jive).
The html documentations generated by Pogo can also be accessed from a local server (particular to the institute).
Consider also filling in the alarm values.
E.g. set the alarm values according to the specifications of the power supply, i.e., 0-24V for the voltage, or 0-3A for the output current.
Example for a temperature reading:
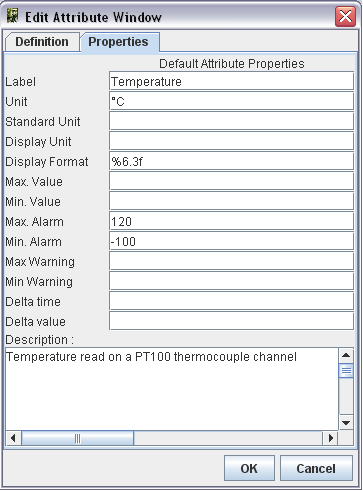
Attributes generation in C++#
In C++, Pogo automatically generates pointers to the data associated with the attributes values (i.e. a pointer is generated for the read part). The use of these pointers is not mandatory. The developer is free to use their own data structure in the attribute value affectation.
Internal device implementation#
Separation between the Tango interface and the internal system function#
Don’t forget that the Tango interface is only a means to insert a microservice in a control system. Therefore, it is necessary to think about the internal design of the device like one would for any other application and just use Tango as an interface on top of it.
As a rule of thumb if the code implemented within the Pogo markers is too long it is good practice to move it to another class meaning the Pogo generated methods will be only a few lines of code long.
In practice, it is necessary to avoid mixing the code generated by Pogo and the code of the developer.
The Tango sub-class inherited from Tango::DeviceImpl[_X] instantiates
a class derived from the model object implementing the system, and
ensure the replacement between the external requests (clients) and the
implementation class(es).
In the choice of data structures, we are talking about those of the developer’s object model, we will consider the technical constraints imposed by Tango and/or the underlying layers (CORBA/ZMQ). The idea here is to avoid copy and/or reorganisation of the data when transferred to the client. For this, the developer needs to know/master the underlying memory management mechanism (especially in C++). Please see the dedicated section Exchanging data between client and server for further details.
Accessing the hardware: always_executed_hook vs. read_attr_hardware#
It is essential to understand the concepts implemented by these two methods, which are common methods for all Tango devices.
It is also necessary to clearly identify, in the design phase, the possible consequences of implementing these two methods on the device behaviour (remember that they are initially just empty shells generated by Pogo).
The
always_executed_hook()method is called before each command is executed or before every read/write of an attribute (but note, it is called only once when reading several attributes: see calling sequence below).The
read_attr_hardware()is called before every read of attribute(s)(but note again, it is called only once when reading several attributes: see calling sequence below). This method aims to optimise (minimise) the equipment access in case of simultaneous reads of multiple attributes in the same request.
Given below is the calling sequence of these methods:
Command execution
1 –
always_executed_hook()2 –
is_MyCmd_allowed()3 –
MyCmd()
Attribute reading
1 –
always_executed_hook()2 –
read_attr_hardware()3 –
is_MyAttr_allowed()4 –
read_MyAttr()
Attribute writing
1 –
always_executed_hook()2 –
is_MyAttr_allowed()3 –
write_MyAttr()
Attributes reading
1 –
always_executed_hook()2 –
read_attr_hardware()3 –
is_MyAttr_allowed()4 –
read_MyAttr()
Attributes writing
1 –
always_executed_hook()2 –
is_MyAttr_allowed()3 –
write_MyAttr()
This demonstrates why having “slow code” in the
MyDevice::always_executed_hook method can have serious consequences
on the device performance.
Note
There is no obligation to use the read_attr_hardware
method; it depends on the equipment and its communication
channel (Ethernet, GPIB, DLL). Instead, one could have a call to the equipment in
the code of each attribute reading method.
For example, for an attribute “temperature”, of READ type, we can insert
the call to the equipment in the generated attribute reading method
read_Temperature instead of read_attr_hardware.
Static database as persistent data storage#
The Tango database can (in some cases) be used to ensure persistence of set values and to store the value as a property (of device or attribute).
However, this practice should be reserved for special cases that don’t require writing at high frequency. An over-solicitation of the Tango database will penalize the entire control system.
It is therefore recommended to use a property for storage only for methods that are performed rarely, compared to other functions.
One example is the storage of calibration operations results.
In the general case, we recommend to:
Use a property to store configuration data,
Use a memorized attribute to store values changing during the execution,
Use a memorized attribute to store values that you want to re-inject during a new execution of the device.
Device property vs memorized attributes#
In some cases, you could be tempted to use a property for a memorized attribute and vice-versa. It is important to distinguish the function of each, and use them wisely.
The use of a property must be limited to configuration data which value doesn’t change at runtime (the IP address of equipment for example).
The memorized attributes are reserved for physical quantities subject to change at runtime (attribute read/write) for which you want to retain (store) the value from one execution to the other.
e.g. speed or acceleration on a motor.
Tip
In the case you want to manually manage the memorization of the
attribute set points, you should use an attribute property called
__value (as natively done by Tango).
Device state management#
States choice#
In Tango, the state is seen as an enumerated type with a fix number of values - see the Device State section for a full list of allowed value. These states have an implicit default meaning and are not equivalent.
Unless strictly specified, the developer is free to use the Tango state she considers appropriate to the situation, with all the subjectivity involved.
The only practice that ensures overall consistency is to use a limited number of Tango states, especially for a family of equipment.
For example, it is recommended for an equipment of type motor, slit, monochromator and more generally for any equipment that can change its position, to use the “MOVING” state when the equipment is in “movement” toward his set point.
Semantics of non-nominal states#
Although the developer is free to choose the device states, we must define a common error state for all the devices.
In general, any dysfunction is associated with the state Tango::FAULT.
The use of the Tango::ALARM state should be reserved for very special
cases where it is necessary to define an intermediate state between
normal operation and fault. Its use must be documented via Pogo in order
to define the semantics.
In the case of a problem occurring at initialization, it is recommended
to set the device state to FAULT.
For the init_device method, we recommend:
If the initialization method is long, thread it.
The device state INIT must be used only in the start-up of the device.
The device states changes when the init execution is over.
Semantics recommended for FAULT and ALARM states are as follows:
UNKNOWN(grey): communication problem with the equipment or the “sub”-devices which prevents the device to really know its real stateFAULT(red): A problem which prevents the normal functioning (including during the initialization). Getting out from a FAULT state is possible only by repairing the cause of the problem and/or executing a Reset command.ALARM(orange): the device is functional but one element is out of range (bad parameters but not preventing the functioning, limit switch of a motor). An attribute is out of range.
Managing state transitions#
It is import to consider how state transitions are handled as a mis-managed transition can cause misleading information to be transmitted to the client.
For example, consider the case of a motor system. The client can use a
poll (i.e. periodically read the state attribute of the motor) the motor
to get the motor state, e.g. STANDBY, MOVING, FAULT. This could lead
to inconsistent behaviour due to inappropriate management of the state.
A typical example is to launch an axis movement through the writing
of the position attribute. The motor should make the transition from
STANDBY to the MOVING state and the client will be expecting it
to be in the MOVING state.
However, this will only work if the device state is switched to MOVING
before the position write request returns. Otherwise, the client
could read back that the motor is still in the STANDBY state and
hence interpret that the move has ended even though it has not started.
This behaviour is illustrated in the figure below:
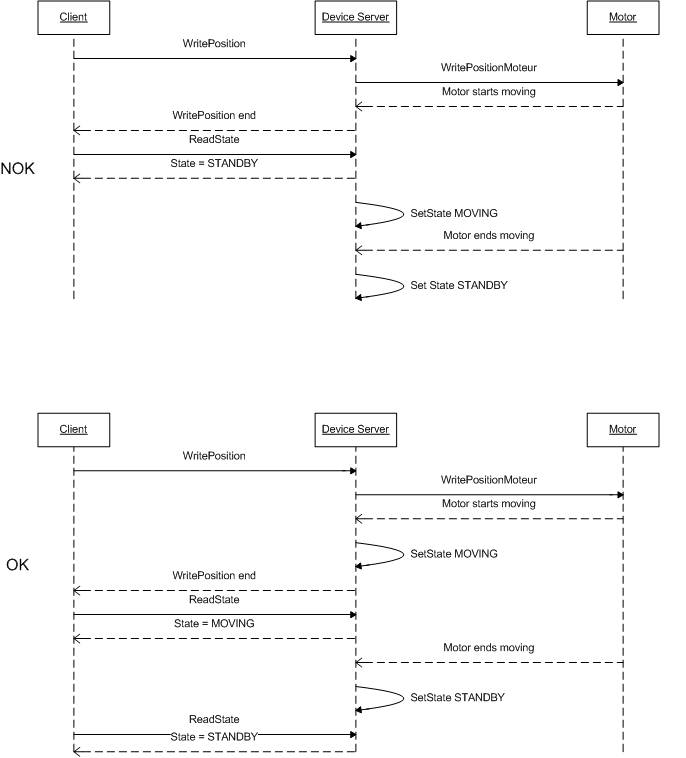
Example of State transitions#
Note
The state transitions and the “associated guarantees” must be documented. In the previous example, rereading the STANDBY state after performing any movement must ensure that the required movement is completed (and not that it has not yet been started!!).
State machine management#
Pogo or developer code#
Tango has a basic management of its state machine. Is_allowed methods
filter the external request depending on the current device state. The
developer must define the device behaviour (regarding its internal
state) via Pogo.
By default, any request (reading, writing, or command execution) is authorized whatever the current device state is.
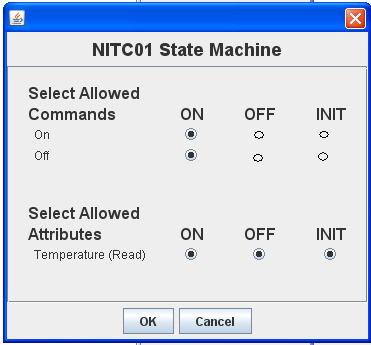
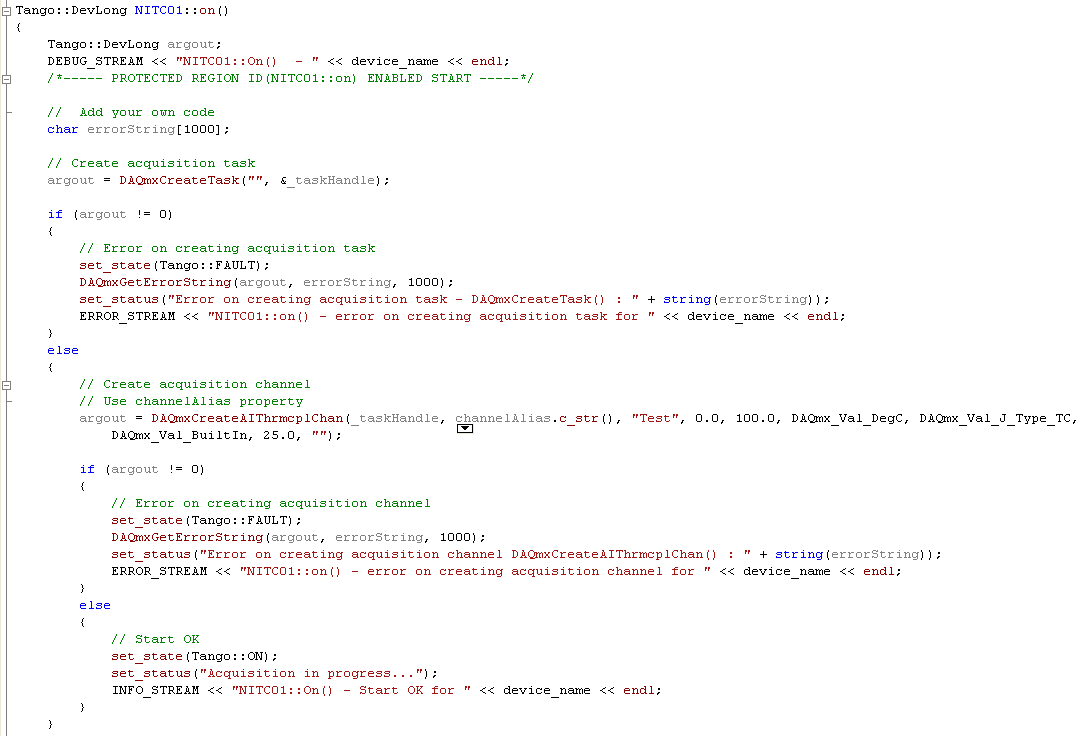
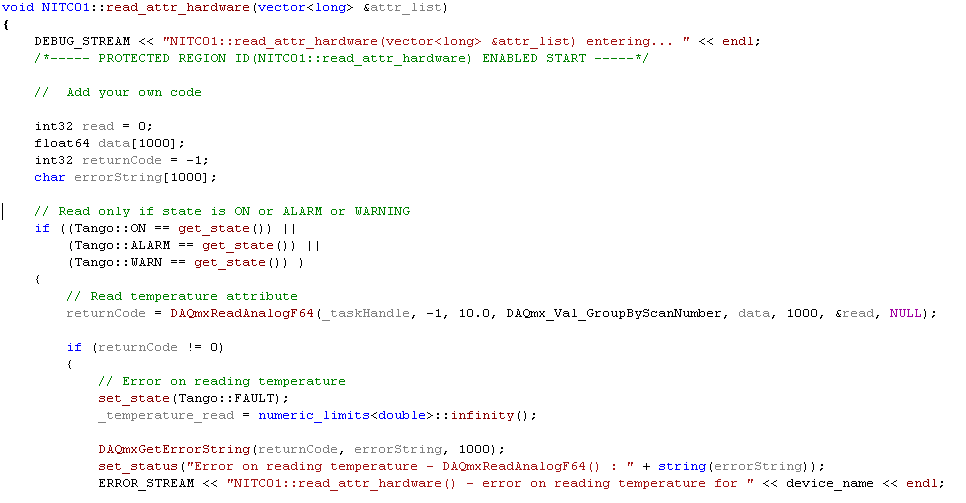
The example below illustrates two ways for the state machine management of a device (here NITC01) in C++:
Managing the “On” command via Pogo
Managing the reading of the attribute “temperature” directly in the code
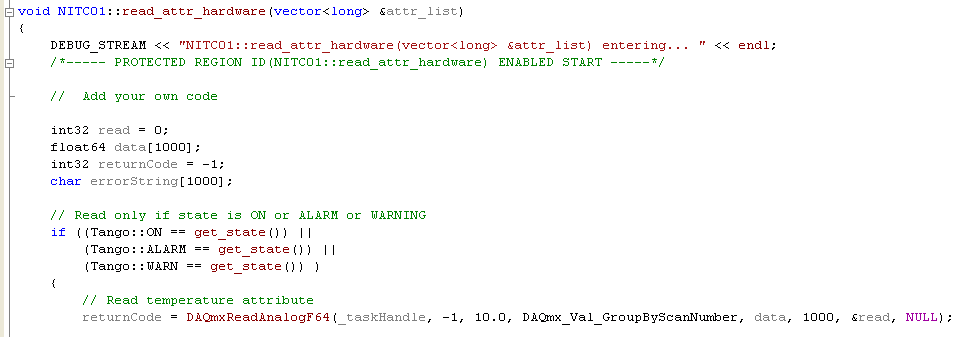
However, the Pogo implementation is “basic”. If, for example, the
execution of the On command on a power supply is prohibited when the
current state is Tango::ON, then the Tango layer, generated by
Pogo, will systematically trigger an exception to the client. From the
operator perspective, this may be a surprise.
In such a case, it is recommended to authorize the command but to ignore it.
Particular case : FAULT state#
The Tango::FAULT state shouldn’t prohibit everything. The
attributes and/or commands that are valid and/or allows the device to
get out of the Tango::FAULT state must remain accessible.
For example, in some cases, when a device used several elementary devices, its state is a combination of the elementary devices states. If one of them is in “FAULT”, we must be able to execute commands on others elementary devices, and, in all cases, have a command to get out of this state.
The transition to a FAULT state needs reflection and a clear
definition of the device management in this state and the output
conditions of this state.
Init and error acknowledgement#
A common mistake is to associate the generic command MyDevice::Init to
an acknowledgement mechanism for the current defect.
The execution of the Init command must be reserved to the device
re-initialization (hardware reconnection after a reboot or
reconfiguration following a property modification).
Any device that requires an acknowledgement mechanism must have a
dedicated command (like Reset or AcknowledgeError).
Other implementations#
You can also create a specific state machine, without using Tango types, in the interface class with the device. Thus, we use this state machine to determine the Tango state of the device. The aims here is to define an internal state machine (with a design pattern “state” for example) then do a mapping with the existing Tango states to determine the device state.
The developer also has the ability to override the State and Status
methods in order to centralize, in a unique method, the management of
the internal device state, which simplifies the update of this
fundamental information.
Logging management#
The importance of rigorous logging management#
The introduction of logging in the device code enables easy development, debugging and the user understanding of the device operations.
The device developer must always use the facilities offered by the
Tango Logging Service to produce “Runtime” messages, facilitating the
understanding of the device operations. Implementations classes can
inherit Tango::LogAdapter to redirect the logs to the common
service.
The rules to follow are:
Logs to the console are prohibited. The developer must use the logging stream proposed by Tango (there is a stream for every logging level, the levels being inclusive in the order specified below): DEBUG_STREAM, INFO_STREAM, WARN_STREAM, ERROR_STREAM, FATAL_STREAM
It is important to use the right level of logging: on a higher level than DEBUG, the device should be a little wordy. Beyond the INFO level, it should produce only critical logs.
Recommendations of use:
DEBUG_STREAM: developer information (route trace)INFO_STREAM: user information (measure, start/stop of a process)WARN_STREAM: warning (eg deprecated operation)ERROR_STREAM: general errorFATAL_STREAM: fatal error, shutdown
It is important to use these streams early in the development as they allow for easier debugging.
You shouldn’t have to modify the code to add traces. E.g. use a
debug_stream level for the input parameters, the display
of a conversion result, the return code from a DLL function…
It is also recommended to adopt a unified formalism for logs, for example:
“<class_name>::<method_name>() - <text trace with parameter (eventually)>”
Example of using different logs levels in C++:
It is also possible to redirect the stream to a file (via Jive). This can be useful in the case of “intermittent” bugs, for which a long log may be required.
Implementation#
It is not mandatory, but it is highly recommended to add an attribute named “log” in the device interface with a string spectrum type. This tracks all the internal activity of the device (as defined in Tango Logging).
In C++, the class
Yat4Tango::InnerAppenderimplements this functionality based on a dynamic attribute (no need to use Pogo).This system facilitates the recovery of errors and therefore the diagnosis of problems. Problem solving will therefore be faster and optimized.
This feature is particularly interesting for devices that manage automatic processes (for example, scanning) which involve other devices. The operator then has easy access through this “log” attribute to the behaviour and decisions taken by the device.
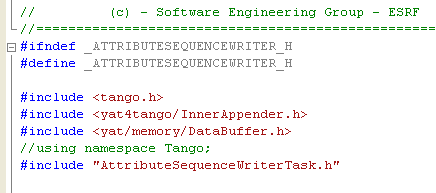
Example in C++ is shown below (look at the YAT documentation for further explanations):
In the header file of the device
Declaration of the service to use
In the source code of the device
init_devicemethod: initialization of the “innerAppender”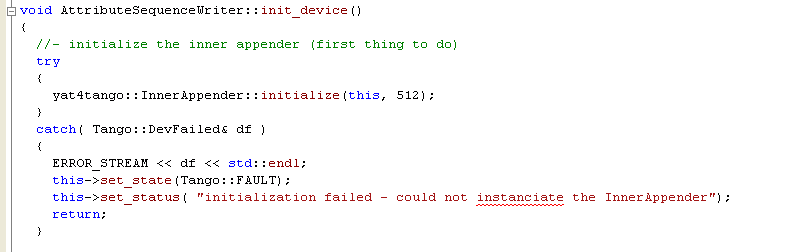
delete_devicemethod: deletion of the “innerAppender”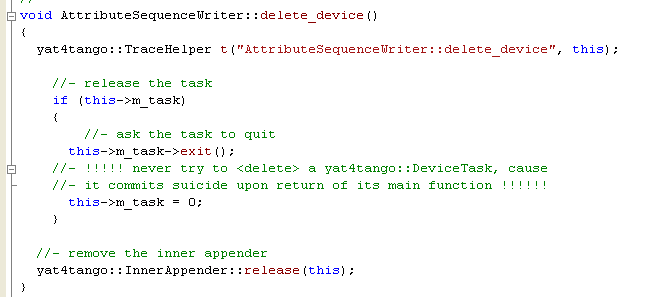
Error handling#
The importance of rigorous error handling#
Error handling is often overlooked but good error handling means easier debugging and maintenance. It is essential for good code quality. These concepts are present in the section Reporting errors.
Below are some typical cases to avoid:
A device doesn’t behave as expected but there is no indication why.
The device is in
FAULTstate but theStatus(the attribute) gives no indication on the problem nature, or worse, a bad indication (thus guiding the users in the wrong direction with a loss of time and energy).The error messages are written in the jargon of the developer or the system expert.
The developer has to ensure that:
Any exception is caught, completed (so Tango allows it) and propagated using the
rethrow_exceptionmethod,If an error occurs it must be logged using the Tango Logging Service
The return code of a function is always analyzed,
The device
Statusis always coherent with theState,The error messages are understandable for the end user and that they are supplemented by logs (with the
ERRORlevel - use of theerror_streammacro). TheStatusis the indicator that will help the user to find the reason for the error.All of the possible error situations are considered and handled. For example, in the use of communication sockets the developer should anticipate all the common communication problems such as a cable not connected, the equipment is off, a sub-devices did not start or is in a
FAULTstate.
Implementation#
On a more technical side, the Tango exceptions don’t provide numerical identifier for discriminating exceptions. In the code, it isn’t possible to distinguish two exceptions without having knowledge of the text (as a string) conveyed by the said exception.
All exceptions are of type Tango::DevFailed. A DevFailed exception
consists of these fields:
Reason: string, defining the error type
Aim: refer the operator to the root cause
Description: string, giving a more precise description
Aim: refer the expert of this system to the root cause.
Origin: string, method where the exception was thrown
Aim : refer the computer scientist to the location of the failure in the code
Severity: enumeration (rarely uses)
Standardized name for error types#
To easily distinguish exceptions, it is recommended to use a finite list of error types for the Reason field and specify in capital letters:
Standardized name for the error types |
|---|
OUT_OF_MEMORY |
HARDWARE_FAILURE |
SOFTWARE_FAILURE |
HDB_FAILURE |
DATA_OUT_OF_RANGE |
COMMUNICATION_BROKEN |
OPERATION_NOT_ALLOWED |
DRIVER_FAILURE |
UNKNOWN_ERROR |
CORBA_TIMEOUT |
Tango_CONNECTION_FAILED |
Tango_COMMUNICATION_ERROR |
Tango_WRONG_NAME_SYNTAX_ERROR |
Tango_NON_DB_DEVICE_ERROR |
Tango_WRONG_DATA_ERROR |
Tango_NON_SUPPORTED_FEATURE_ERROR |
Tango_ASYNC_CALL_ERROR |
Tango_ASYNC_REPLY_NOT_ARRIVED_ERROR |
Tango_EVENT_ERROR |
Tango_DEVICE_ERROR |
CONFIGURATION_ERROR |
DEPENDENCY_ERROR |
NO_DEPENDENCY |
Below is an example of an exception message:
Reason: DATA_OUT_OF_RANGE
Description:
AxisMotionAccuracymust be at least 1 motor step!Origin:
GalilAxis::write_attr_hardware
The exception hierarchy defined by Tango is only available for internal use (Tango core) and so the developer cannot inherit and define their own inherited exceptions classes. This strong constraint is related to the underlying CORBA IDL.
Further advice for managing exceptions:
Always keep the original exception. It must be the first visible item in the device status.
If there is a succession of exceptions, the logic dictates that the first exception has possibly generated all the others. By resolving the first exception, the others can disappear.
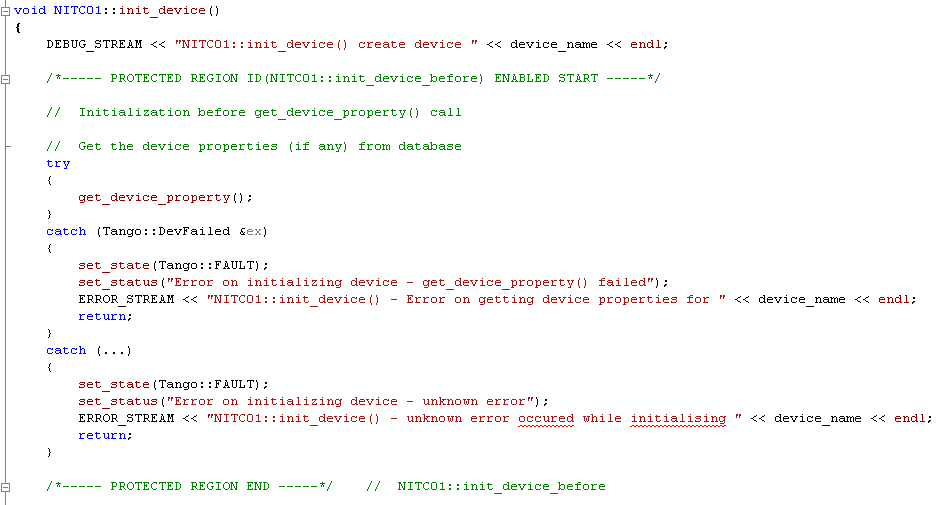
For exception handling in init_device method:
no exceptions should be propagated from the method
MyDevice::init_device. Otherwise, the device quits. The device should be kept alive regardless of any failure.The code for this method must contain a try/catch block, which guarantees that no exception is propagated in this context.
If an exception is thrown, the developer must set the device state to
FAULTand update theStatusto indicate the error nature. (The goal is to understand easily why the device failed to initialize properly, while still allowing the operator to adjust this or these problems)
Examples of error handling in C++:
If an error occurs, always log it
Always update State AND Status
Manage the return code for function that have one
Manage the exceptions for methods which can throw some
Details for an attribute#
Although Tango supports the notion of quality on an attribute value
(Tango::VALID, Tango::INVALID, …), only few clients use this
information to judge the validity of the data returned so it is best to not make
assumptions on the use of this to report an invalid value to the client. That is
to say that forcing the attribute quality to Tango::INVALID is necessary
but not sufficient.
For floating point values, it is possible to set the value to “NaN”, but there is no equivalent for an integer. To avoid the handling of special cases, it is recommended to throw an exception to indicate the data invalidity.
It is recommended to throw an exception for all invalid values, regardless of their type. There is, however, two exceptions to this rule: State and Status. For these two attributes, always return a value.
This solution has the disadvantage of showing a pop-up on the client side, but this is the most effective method to indicate that the attribute reading has failed.
Details for the properties#
Properties reading during device initialization#
As it stands, the code generated by Pogo doesn’t wrap the method
which ensures the reading of properties from the Tango database in a try/catch
block (see MyDevice::init_device). However, it may fail and cause
the generation of an exception. As mentioned above, the developer must
ensure that any exception thrown in the init_device method (or a
method called from it) is caught and not propagated.
In the case of a Tango exception during the properties reading, the developer should systematically:
detect the error (catch it).
log it with level
ERROR.set the device to the
FAULTstate.update the Status indicating the origin of the problem.
Example in C++ :
As a reminder, the default value for a property is defined with Pogo and
the value is stored in the database via the put_property() method.
Properties without default values#
Pogo allows a default value for a property not present in the Tango database to be defined.
For mandatory properties that have no default values, the developer should systematically:
detect the absence of the value in the database.
log the problem explicitly with the level
ERROR(indicate the missing property).set the device to the
FAULTstate.update the Status indicating the problem origin.
Appendices#
About these guidelines#
These guidelines originated within the collaborative framework between SOLEIL and MAX-IV to define common software quality rules for shared software between these 2 institutes. It has since been adopted by the Tango Controls community and is maintained for and by the community.
The objectives are therefore to enhance the general software quality of Device Servers developed by the various sites using Tango. This will also facilitate the reusability of code between sites by providing “reliable off-the-shelves” Tango servers in public repositories.
This document can be freely distributed (under the Creative Commons license) to subcontractors, students, etc…
Note
The content of this document is generally independent of the programming language used. However, there are some “C++ oriented” recommendations. For Java and Python refer to the relevant documentation for language specific issues.