The Tango device server model#
This chapter describes the Tango device server object model, hereafter referred to as TDSOM.
The TDSOM can be divided into the following basic elements:
device
server
database
API
This chapter will treat each of the above elements separately.
Some knowledge of COBRA might be useful when reading this chapter - please see An introduction to CORBA.
The model#
The basic idea of the TDSOM is to treat each device as an object.
Each device is a separate entity which has its own data and behavior.
Each device has a unique name which identifies it in network name space.
Devices are organized according to classes, each device belonging to
a class. All classes are derived from one root class thus allowing some
common behavior for all devices. Five kind of requests can be sent to a
device:
Execute actions via Tango
commandsRead/Set data specific to each device belonging to a class via Tango
attributesRead/Set data specific to each device belonging to a class via Tango
pipesRead some basic device data available for all devices via CORBA attributes
Execute a predefined set of actions available for every device via CORBA operations
Each device is stored in a process called a device server. Devices are configured at runtime via properties which are stored in the database.
The device#
The device is at the heart of the TDSOM. A device is an abstract concept defined by the TDSOM. In reality, it can be a piece of hardware (an interlock bit), a collection of hardware (a screen attached to a stepper motor), a logical device (a taper) or a combination of all these (an accelerator). Each device has a unique name in the control system and eventually one alias. Within Tango, a four field name space has been adopted consisting of
[//TANGO_HOST:PORT/]DOMAIN/FAMILY/MEMBER
TANGO_HOST:PORT refers to the tango database,
domain refers to the sub-system, family the group and member the instance of the device.
Device name alias(es) must also be unique within a control system. There
is no predefined syntax for device name alias.
Each device belongs to a class. The device class contains a complete description and implementation of the behavior of all members of that class. New device classes can be constructed out of existing device classes. In this way a new hierarchy of classes can be built up in a short time. Device classes can reuse existing devices as sub-classes.
All device classes are derived from the exact same base class (the device root class) and implements the identical CORBA interface. All devices implementing the identical CORBA interface ensures that all control objects support the same set of CORBA operations and attributes. The device root class contains part of the common device code. By inheriting from this class, all devices share a common behavior. This also makes maintenance and improvements to the TDSOM easy to carry out.
All devices also bring a black box where client requests for
attributes and operations are recorded. This feature helps in debugging sessions
of devices already installed in a running control system. This is a lightweight alternative to
telemetry.
Tango Commands#
Commands are executed using two CORBA operations named command_inout for synchronous commands and
command_inout_async for asynchronous commands. These two operations call a special method implemented in
the device root class, the command_handler method. The command_handler calls an is_allowed method
implemented in the device class before calling the command itself. The is_allowed method is specific to each
command [1]. It checks to see whether the command to be executed is compatible with the present
device state. The command function is executed only if the is_allowed method allows it. Otherwise, an
exception is sent to the client.
Tango attributes#
In addition to commands, Tango devices also support normalized data types called attributes [2]. Commands are device specific and the data they transport are not normalized i.e. they can be any one of the Tango data types with no restriction on what each byte means. This means that it is difficult to interpret the output of a command in terms of what kind of value(s) it represents. Generic display programs need to know what the data returned represents, in what units it is, plus additional information like minimum, maximum, quality etc. Tango attributes solve this problem.
Tango attributes are zero, one or two dimensional data which have a fixed
set of properties e.g. quality, minimum and maximum, alarm low and high.
They are transferred in a specialized Tango type and can be READ, WRITE
or READ-WRITE. A device can support a list of attributes. Clients can
read one or more attributes from one or more devices. To read Tango
attributes, the client uses the read_attributes operation. To write
Tango attributes, a client uses the write_attributes operation. To
write then read Tango attributes within the same network request, the
client uses the write_read_attributes operation. To query a device
for all the attributes it supports, a client uses the
get_attribute_config operation. A client is also able to modify
some of the parameters defining an attribute with the
set_attribute_config operation. These five operations are defined
in the device CORBA interface.
Tango support thirteen data types for attributes (and arrays for one or two dimensional data) which are: boolean, short, long (32 bits), long (64 bits), float, double, unsigned char, unsigned short, unsigned long (32 bits), unsigned long (64 bits), string, a specific data type for Tango device state and finally another specific data type to transfer data as an array of unsigned char with a string describing the coding of the data.
The Tango pipes#
Warning
Pipes are slated for removal.
Tango devices also support pipes.
In some cases, it is required to exchange data between client and device
of varying data type. This is for instance the case of data gathered
during a scan on one experiment. Because the number of actuators and
sensors involved in the scan may change from one scan to another, it is
not possible to use a well defined data type. Tango pipes have been
designed for such cases. A Tango pipe is basically a pipe dedicated to
transfer data between client and device. A pipe has a set of two
properties which are the pipe label and its description. A pipe can be
read or read-write. A device can support a list of pipes. Clients can
read one or more pipes from one or more devices. To read a Tango pipe,
the client uses the read_pipe operation. To write a Tango pipe, a
client uses the write_pipe operation. To write then read a Tango
pipe within the same network request, the client uses the
write_read_pipe operation. To query a device for all the pipes it
supports, a client uses the get_pipe_config operation. A client is
also able to modify some of parameters defining a pipe with the
set_pipe_config operation. These five operations are defined in
the device CORBA interface.
In contrast to commands or attributes, a Tango pipe does not have a pre-defined data type. Data transferred through pipes may be of any basic Tango data type (or array of) and this may change every time a pipe is read or written.
Commands, attributes or pipes?#
There are no strict rules concerning what should be returned as command result and what should be implemented as an attribute or as a pipe. Nevertheless, attributes are more adapted to return physical values which have a kind of time consistency. Attribute also have more properties which help the client to precisely know what it represents. For instance, the state and the status of a power supply are not physical values and are returned as command results. The current generated by the power supply is a physical value and is implemented as an attribute. The attribute properties allow a client to know its unit, its label and some other information which are related to a physical value. Commands are well adapted to send orders to a device like switching from one mode of operation to another mode of operation. For a power supply, the switch from a STANDBY mode to a ON mode is typically done via a command. Finally, pipe is well adapted when the kind and number of data exchanged between the client and the device changes with time.
The CORBA attributes#
Some key data implemented for each device can be read without the need to call a command or read an attribute:
The device state: a number representing its state. A set of predefined states are defined in the TDSOM.
The device status: a string describing in plain text the device state and any additional useful information of the device as a formatted ASCII string.
The device name: name as defined here
The administration device name called
adm_name: for each set of devices grouped within the same server, an administration device is automatically added. Thisadm_nameis the name of the administration device.The device description: an ASCII string describing the device
These five CORBA attributes are implemented in the device root class and therefore do not need to be implemented by the device server developer. As explained in the CORBA paragraph, the CORBA attributes are not allowed to raise exceptions whereas command (which are implemented using CORBA operations) can.
The remaining CORBA operations#
The TDSOM also supports a list of actions defined as CORBA operations in the device interface and implemented in the device root class. Therefore, these actions are implemented automatically for every Tango device:
Operation |
Explanation |
|---|---|
ping |
Ping a device to check if the device is alive and reachable over the network Obviously, it checks only the connection from a client to the device and not all the device functionalities |
command_list_query |
Request a list of all the commands supported by a device with their input, output types and description |
command_query |
Request information about a specific command which are its input, output type and description |
info |
Request general information on the device like its name, the host where the device server hosting the device is running etc. |
black_box |
Read the device black-box as an array of strings |
The special case of the device state and status#
The device state and status are the most important pieces of device information. Nearly all client software dealing with Tango devices need device state and/or status. In order to simplify client software developer work, it is possible to get these two piece of information in three different ways:
Using the appropriate CORBA attribute (
stateandstatus)Using a command on the device. The commands are called
StateandStatusUsing attributes: Even if the state and status are not real attributes, it is possible to get their value using the
read_attributesoperation. Nevertheless, it is not possible to set the attribute configuration for state and status. An error is reported by the server if a client tries to do so.
Device polling#
Within the Tango framework, it is also possible to force executing
commands or reading attributes at a fixed frequency. This is called
device polling. This is automatically handled by Tango core software
with a pool of polling threads. The command results or attribute values are
stored in circular buffers. When a client wants to read an attribute value,
or command result, for a polled attribute/command they have
the choice to get the attribute value (or command result) with direct
access to the device or from the last value stored in the device ring
buffer. The latter is optimal for “slow” devices as getting data from
the buffer is much faster than accessing the device itself. The
disadvantage is the time taken between the data returned from
the polling buffer and the time of the request. Polling a command is
only possible for commands without input arguments and these commands should also be idempotent.
It is not possible to poll a device pipe.
Two other CORBA operations called command_inout_history_X and
read_attribute_history_X allow a client to retrieve the history of
polled commands/attributes stored in the polling buffers.
See the device polling explanation for details.
The server#
Another integral part of the TDSOM is the server concept. The server
(also referred to as the device server) is a process where the main task is to
offer one or more services to one or more clients. To do this, the
server has to spend most of its time in a loop waiting for clients
to connect to it. The devices are hosted in the server process. A server
is able to host several classes of devices. In the TDSOM, a device of
the DServer class is automatically hosted by each device server.
This class of device supports commands which enable remote device server
process administration.
The Tango Logging Service#
During software life, it is always convenient to print miscellaneous information which help to:
Debug the software
Report on error
Give regular information to the user
This is classically done using the print function in your chosen programming language. In a highly
distributed control system, it is difficult to get all this information coming from a high number of
different processes running on a large number of computers. Tango has incorporated a
Logging Service called the Tango Logging Service (TLS) which allows print messages to be:
Displayed on a console (the classical way)
Sent to a file
Sent to specific Tango device called
LogConsumer. The Tango package has an implementation of a log consumer where every consumer device is associated to a graphical interface.
The log consumer’s graphical interface displays messages but could also be used to sort messages, to filter messages etc. With this feature it is possible to centralize these messages coming from different devices embedded within different processes.
These log consumers can be:
Statically configured meaning that it memorizes the list of Tango devices for which it will get and display messages
Dynamically configured. The user chooses devices from which they want to see messages
The database#
To achieve complete device independence, it is however necessary to
supplement device classes with the possibility for configuring device
dependencies at runtime. The utility which does this in the TDSOM is the
property database. Properties [3] are identified by an ASCII string
and the device name. Tango attributes are also configured using
properties. This database is also used to store device network addresses
(CORBA IORs), list of classes hosted by a device server process and
list of devices for each class in a device server process. The database
ensures the uniqueness of device name and of aliases. It also links device
name and its list of aliases.
Tango uses MariaDB as its SQL-database. The database is accessed via a classical Tango device hosted in a device server. Therefore, client access the database via Tango commands requested on the database device.
The controlled access#
Warning
This prevents accidental changes only and is not secure against malicious actors.
Tango also provides a controlled access system called Tango Access Control. It’s a simple controlled access system and does not provide encrypted communication or sophisticated authentication. It simply defines which user (based on computer login authentication) is allowed to do which command (or write attribute) on which device and from which host. The information used to configure this controlled access feature is stored in the Tango database and accessed by a specific Tango device server which is not the classical Tango database device server described in the previous section. Two access levels are defined:
Everything is allowed for this user from this host
The write-like calls on the device are forbidden and according to configuration, a command subset is also forbidden for this user from this host
The Application Programming Interfaces#
Rules of the API#
While it is true that Tango clients can be programmed using only the CORBA API, CORBA knows nothing about Tango. This means clients have to know all the details of retrieving IORs from the Tango database, the additional information to send on the wire, the Tango version control etc. These details can and should be wrapped in the Tango Application Programming Interface (API). The API is implemented as a library in C++ and as a package in Java. PyTango has been implemented on top of the C++ API. The API is what makes Tango clients easy to write.
The APIs consist of the following basic classes:
DeviceProxywhich is a proxy to the real deviceAttributeProxywhich is a proxy to an Attribute of a real deviceDeviceDatato encapsulate data to send/receive from/to device via commandsDeviceAttributeto encapsulate data to send/receive from/to device via attributesGroupwhich is a proxy to a group of devices
Note
In Tango the term client usually refers to either an AttributeProxy or to a DeviceProxy.
In addition to these main classes, many other classes allow interfacing to all Tango features. The following figure is a drawing of a typical client/server application using Tango.

The database is used during the server and client startup phase to establish a connection between client and server.
Communication between client and server using the API#
With the API, it is possible to request commands to be executed on a device or to read/write device attribute(s) using one of the two communication models implemented. These two models are:
The synchronous model where the client waits (and is blocked) for the server to send the answer or until a timeout is reached.
The asynchronous model. In this model, the clients sends the request and immediately returns. It is not blocked. It is free to do whatever it has to do like updating a graphical user interface. The client has the choice to retrieve the server answer by checking if the reply has arrived by calling an API specific call or by requesting that a callback method is executed when the client receives the server response.
Tango events#
On top of the two communication models previously described, Tango offers an event system. The standard Tango communication paradigm is a synchronous/asynchronous two-way call. In this paradigm the call is initiated by the client who contacts the server. The server handles the client’s request and sends the answer to the client or throws an exception which the client catches. This paradigm involves two calls to receive a single answer and requires the client to be active in initiating the request. If the client has a permanent interest in a value it is obliged to poll the server for an update in a value every time. This is not efficient in terms of network bandwidth usage nor in terms of client programming.
For clients which are permanently interested in values, the event-driven communication paradigm is a more efficient and natural way of programming. In this paradigm the client registers its interest once in an event (value). After that the server informs the client every time the event has occurred. This paradigm avoids the client polling and frees it for doing other things, which is faster and makes efficient use of the network.
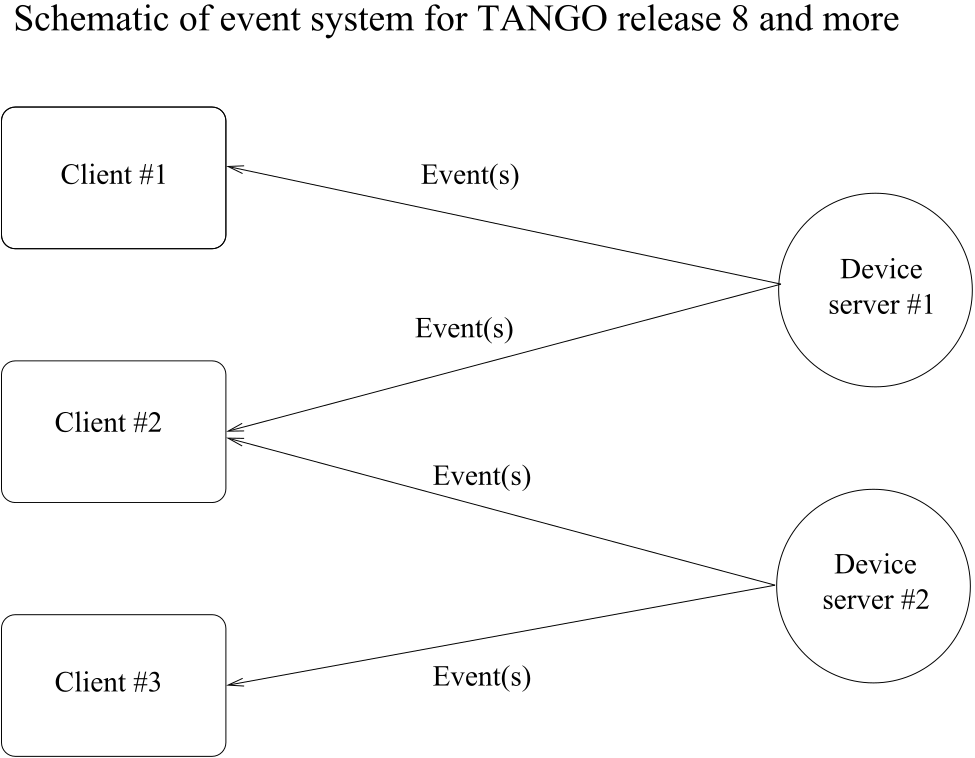
ZMQ is a library allowing users to create communicating systems. It implements several well known communication pattern including the Publish/Subscribe pattern, which is the basis of the new Tango event system. Using this library, a separate notification service is not needed and event communication is available with only client and server processes simplifying the overall design.
The following figure is a schematic of the Tango event system: