Writing a TANGO device server
Intended audience: developers, Programming language: c++
The device server framework
This chapter will present the TANGO device server framework. It will introduce what is the device server pattern and then it will describe a complete device server framework. A definition of classes used by the device server framework is given in this chapter. This manual is not intended to give the complete and detailed description of classes data member or methods, refer to [TangoRefMan] to get this full description. But first, the naming convention used in this project is detailed.
The aim of the class definition given in this chapter is only to help the reader to understand how a TANGO device server works. For a detailed description of these classes (and their methods), refer to chapter [Writing_chapter] or to [TangoRefMan].
Naming convention and programming language
TANGO fully supports three different programming languages which are C++, Java and Python. This documentation focuses on C++ Tango class. For Java and Python Tango class, have a look at the [TangoRefMan] pages where similar chapter for Java and Python are available.
Every software project needs a naming convention. The naming convention adopted for the TDSOM is very simple and only defines two guidelines which are:
Class names start with uppercase and use capitalization for compound words (For instance MyClassName).
Method names are in lowercase and use underscores for compound words (For instance my_method_name).
The device pattern
Device server are written using the Device pattern. The aim of this pattern is to provide the control programmer with a framework in which s/he can develop new control objects. The device pattern uses other design patterns like the Singleton and Command patterns. These patterns are fully described in [Patterns]. The device pattern class diagram for stepper motor device is drawn in figure 6.1
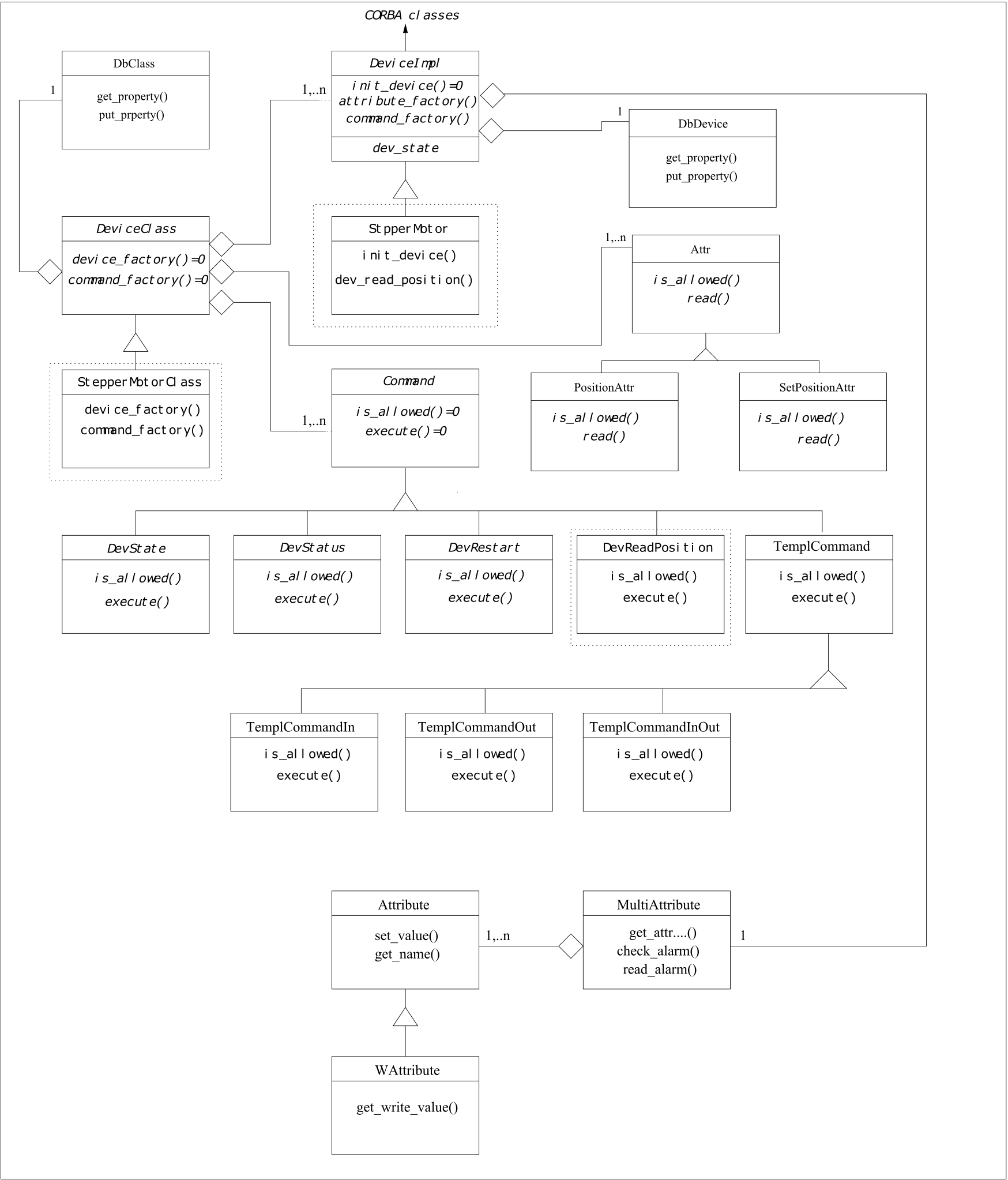
Figure 6.1: Device pattern class diagram
. In this figure, only classes surrounded with a dash line square are device specific. All the other classes are part of the TDSOM core and are developed by the Tango system team. Different kind of classes are used by the device pattern.
Three of them are root classes and it is only necessary to inherit from them. These classes are the DeviceImpl, DeviceClass and Command classes.
Classes necessary to implement commands. The TDSOM supports two ways to create command : Using inheritance or using the template command model. It is possible to mix model within the same device pattern
Using inheritance. This model of creating command heavily used the polymorphism offered by each modern object oriented programming language. In this schema, each command supported by a device via the command_inout or command_inout_async operation is implemented by a separate class. The Command class is the root class for each of these classes. It is an abstract class. A execute method must be defined in each sub-class. A is_allowed method may also be re-defined in each class if the default one does not fulfill all the needs 1. In our stepper motor device server example, the DevReadPosition command follows this model.
Using the template command model. Using this model, it is not necessary to write one class for each command. You create one instance of classes already defined in the TDSOM for each command. The link between command name and method which need to be executed is done through pointers to method. To support different kind of command, four classes are part of the TDSOM. These classes are :
The TemplCommand class for command without input or output parameter
The TemplCommandIn class for command with input parameter but without output parameter
The TemplCommandOut class for command with output parameter but without input parameter
The TemplCommandInOut class for all the remaining commands
Classes necessary to implement TANGO device attributes. All these classes are part of the TANGO core classes. These classes are the MultiAttribute, Attribute, WAttribute, Attr, SpectrumAttr and ImageAttr classes. The last three are used to create user attribute. Each attribute supported by a device is implemented by a separate class. The Attr class is the root class for each of these classes. According to the attribute data format, the user class implementing the attribute must inherit from the Attr, SpectrumAttr or ImageAtttr class. SpectrumAttr class inherits from Attr class and Image Attr class inherits from the SpectrumAttr class. The Attr base class defined three methods called is_allowed, read and write. These methods may be redefined in sub-classes in order to implement the attribute specific behaviour.
The other are device specific. For stepper motor device, they are named StepperMotor, StepperMotorClass and DevReadPosition.
The Tango base class (DeviceImpl class)
Description
This class is the device root class and is the link between the Device pattern and CORBA. It inherits from CORBA classes and implements all the methods needed to execute CORBA operations and attributes. For instance, its method command_inout is executed when a client requests a command_inout operation. The method name of the DeviceImpl class is executed when a client requests the name CORBA attribute. This class also encapsulates some key device data like its name, its state, its status, its black box…. This class is an abstract class and cannot be instantiated as is.
Contents
The contents of this class can be summarized as :
Different constructors and one destructor
Methods to access instance data members outside the class or its derivate classes. These methods are necessary because data members are declared as protected.
Methods triggered by CORBA attribute request
Methods triggered by CORBA operation request
The init_device() method. This method makes the class abstract. It should be implemented by a sub-class. It is used by the inherited classes constructors.
Methods triggered by the automatically added State and Status commands. These methods are declared virtual and therefore can be redefined in sub-classes. These two commands are automatically added to the list of commands defined for a class of devices. They are discussed in chapter [Auto_cmd]
A method called always_executed_hook() always executed for each command before the device state is tested for command execution. This method gives the programmer a hook where he(she) can program some mandatory action which must be done before any command execution. An example of the such action is an hardware access to the device to read its real hardware state.
A method called read_attr_hardware() triggered by the read_attributes CORBA operation. This method is called once for each read_attributes call. This method is virtual and may be redefined in sub-classes.
A method called write_attr_hardware() triggered by the write_attributes CORBA operation. This method is called once for each write_attributes call. This method is virtual and may be redefined in sub-classes.
Methods for signal management (C++ specific)
Data members like the device name, the device status, the device state
Some private methods and data members
The DbDevice class
Each DeviceImpl instance is an aggregate with one instance of the DbDevice class. This DbDevice class can be used to query or modify device properties. It provides an easy to use interface for device objects in the database. The description of this class can be found in the Tango API reference documentation available on the Tango WEB pages.
The Command class
Description of the inheritance model
Within the TDSOM, each command supported by a device and implemented using the inheritance model is implemented by a separate class. The Command class is the root class for each of these classes. It is an abstract class. It stores the command name, the command argument types and description and mainly defines two methods which are the execute and is_allowed methods. The execute method should be implemented in each sub-class. A default is_allowed method exists for command always allowed. A command also stores a parameter which is the command display type. It is also used to select if the command must be displayed according to the application mode (every day operation or expert mode).
Description of the template model
Using this method, it is not necessary to create a separate class for each device command. In this method, each command is represented by an instance of one of the template command classes. They are four template command classes. All these classes inherits from the Command class. These four classes are :
The TemplCommand class. One object of this class must be created for each command without input nor output parameters
The TemplCommandIn class. One object of this class must be created for each command without output parameter but with input parameter
The TemplCommandOut class. One object of this class must be created for each command without input parameter but with output parameter
The TemplCommandInOut class. One object of this class must be created for each command with input and output parameters
These four classes redefine the execute and is_allowed method of the Command class. These classes provides constructors which allow the user to :
specify which method must be executed by these classes execute method
optionally specify which method must be executed by these classes is_allowed method.
The method specification is done via pointer to method.
Remember that it is possible to mix command implementation method within the same device pattern.
Contents
The content of this class can be summarizes as :
Class constructors and destructor
Declaration of the execute method
Declaration of the is_allowed method
Methods to read/set class data members
Methods to extract data from the object used to transfer data on the network
Methods to insert data into the object used to transfer data on the network
Class data members like command name, command input data type, command input data description…
The DeviceClass class
Description
This class implements all what is specific for a controlled object class. For instance, every device of the same class supports the same list of commands and therefore, this list of available commands is stored in this DeviceClass. The structure returned by the info operation contains a documentation URL 2. This documentation URL is the same for every device of the same class. Therefore, the documentation URL is a data member of this class. There should have only one instance of this class per device pattern implementation. The device list is also stored in this class. It is an abstract class because the two methods device_factory() and command_factory() are declared as pure virtual. The rule of the device_factory() method is to create all the devices belonging to the device class. The rule of the command_factory() method is to create one instance of all the classes needed to support device commands. This class also stored the attribute_factory method. The rule of this method is to store in a vector of strings, the name of all the device attributes. This method has a default implementation which is an empty body for device without attribute.
Contents
The contents of this class can be summarize as :
The command_handler method
Methods to access data members.
Signal related method (C++ specific)
Class constructor. It is protected to implements the Singleton pattern
Class data members like the class command list, the device list…
The DbClass class
Each DeviceClass instance is an aggregate with one instance of the DbClass class. This DbClass class can be used to query or modify class properties. It provides an easy to use interface for device objects in the database. The description of this class can be found in the reference Tango C++ API documentation available in the Tango WEB pages.
The MultiAttribute class
Description
This class is a container for all the TANGO attributes defined for the device. There is one instance of this class for each device. This class is mainly an aggregate of Attribute object(s). It has been developed to ease TANGO attribute management.
Contents
The class contents could be summarizes as :
Miscellaneous methods to retrieve one attribute object in the aggregate
Method to retrieve a list of attribute with an alarm level defined
Get attribute number method
Miscellaneous methods to check if an attribute value is outside the authorized limits
Method to add messages for all attribute with an alarm set
Data members with the attribute list
The Attribute class
Description
There is one object of this class for each device attribute. This class is used to store all the attribute properties, the attribute value and all the alarm related data. Like commands, this class also stores th attribute display type. It is foreseen to be used by future Tango graphical application toolkit to select if the attribute must be displayed according to the application mode (every day operation or expert mode).
Contents
Miscellaneous method to get boolean attribute information
Methods to access some data members
Methods to get/set attribute properties
Method to check if the attribute is in alarm condition
Methods related to attribute data
Friend function to print attribute properties
Data members (properties value and attribute data)
The WAttribute class
Description
This class inherits from the Attribute class. There is one instance of this class for each writable device attribute. On top of all the data already managed by the Attribute class, this class stores the attribute set value.
Contents
Within this class, you will mainly find methods related to attribute set value storage and some data members.
The Attr class
Within the TDSOM, each attribute supported by a device is implemented by a separate class. The Attr class is the root class for each of these classes. It is used in conjonction with the Attribute and Wattribute classes to implement Tango attribute behaviour. It defines three methods which are the is_allowed, read and write methods. A default is_allowed method exists for attribute always allowed. Default read and write empty methods are defined. For readable attribute, it is necessary to overwrite the read method. For writable attribute, it is necessary to overwrite the write method and for read and write attribute, both methods must be overwritten.
The SpectrumAttr class
This class inherits from the Attr class. It is the base class for user spectrum attribute. It is used in conjonction with the Attribute and WAttribute class to implement Tango spectrum attribute behaviour. From the Attr class, it inherits the Attr is_allowed, read and write methods.
The ImageAttr class
This class inherits from the SpectrumAttr class. It is the base class for user image attribute. It is used in conjonction with the Attribute and WAttribute class to implement Tango image attribute behaviour. From the Attr class, it inherits the Attr is_allowed, read and write methods.
The StepperMotor class
Description
This class inherits from the DeviceImpl class and is the class implementing the controlled object behavior. Each command will trigger a method in this class written by the device server programmer and specific to the object to be controlled. This class also stores all the device specific data.
Definition
1 class StepperMotor: public TANGO_BASE_CLASS
2 {
3 public :
4 StepperMotor(Tango::DeviceClass *,string &);
5 StepperMotor(Tango::DeviceClass *,const char *);
6 StepperMotor(Tango::DeviceClass *,const char *,const char *);
7 ~StepperMotor() {};
8
9 DevLong dev_read_position(DevLong);
10 DevLong dev_read_direction(DevLong);
11 bool direct_cmd_allowed(const CORBA::Any &);
12
13 virtual Tango::DevState dev_state();
14 virtual Tango::ConstDevString dev_status();
15
16 virtual void always_executed_hook();
17
18 virtual void read_attr_hardware(vector<long> &attr_list);
19 virtual void write_attr_hardware(vector<long> &attr_list);
20
21 void read_position(Tango::Attribute &);
22 bool is_Position_allowed(Tango::AttReqType req);
23 void write_SetPosition(Tango::WAttribute &);
24 void read_Direction(Tango::Attribute &);
25
26 virtual void init_device();
27 virtual void delete_device();
28
29 void get_device_properties();
30
31 protected :
32 long axis[AGSM_MAX_MOTORS];
33 DevLong position[AGSM_MAX_MOTORS];
34 DevLong direction[AGSM_MAX_MOTORS];
35 long state[AGSM_MAX_MOTORS];
36
37 Tango::DevLong *attr_Position_read;
38 Tango::DevLong *attr_Direction_read;
39 Tango::DevLong attr_SetPosition_write;
40
41 Tango::DevLong min;
42 Tango::DevLong max;
43
44 Tango::DevLong *ptr;
45 };
46
47 } /* End of StepperMotor namespace */
Line 1 : The StepperMotor class inherits from the DeviceImpl class
Line 4-7 : Class constructors and destructor
Line 9 : Method triggered by the DevReadPosition command
Line 10-11 : Methods triggered by the DevReadDirection command
Line 13 : Redefinition of the dev_state method of the DeviceImpl class. This method will be triggered by the State command
Line 14 : Redefinition of the dev_status method of the DeviceImpl class. This method will be triggered by the Status command
Line 16 : Redefinition of the always_executed_hook method.
Line 26 : Definition of the init_device method (declared as pure virtual by the DeviceImpl class)
Line 27 : Definition of the delete_device method
Line 31-45 : Device data
The StepperMotorClass class
Description
This class inherits from the DeviceClass class. Like the DeviceClass class, there should be only one instance of the StepperMotorClass. This is ensured because this class is written following the Singleton pattern as defined in [Patterns]. All controlled object class data which should be defined only once per class must be stored in this object.
Definition
1 class StepperMotorClass : public DeviceClass
2 {
3 public:
4 static StepperMotorClass *init(const char *);
5 static StepperMotorClass *instance();
6 ~StepperMotorClass() {_instance = NULL;}
7
8 protected:
9 StepperMotorClass(string &);
10 static StepperMotorClass *_instance;
11 void command_factory();
12
13 private:
14 void device_factory(Tango_DevVarStringArray *);
15 };
Line 1 : This class is a sub-class of the DeviceClass class
Line 4-5 and 9-10: Methods and data member necessary for the Singleton pattern
Line 6 : Class destructor
Line 11 : Definition of the command_factory method declared as pure virtual in the DeviceClass call
Line 13-14 : Definition of the device_factory method declared as pure virtual in the DeviceClass class
The DevReadPosition class
Description
This is the class for the DevReadPosition command. This class implements the execute and is_allowed methods defined by the Command class. This class is necessary because this command is implemented using the inheritance model.
Definition
1 class DevReadPositionCmd : public Command
2 {
3 public:
4 DevReadPositionCmd(const char *,Tango_CmdArgType, Tango_CmdArgType, const char *, const char*);
5 ~DevReadPositionCmd() {};
6
7 virtual bool is_allowed (DeviceImpl *, const CORBA::Any &);
8 virtual CORBA::Any *execute (DeviceImpl *, const CORBA::Any &);
9 };
Line 1 : The class is a sub class of the Command class
Line 4-5 : Class constructor and destructor
Line 7-8 : Definition of the is_allowed and execute method declared as pure virtual in the Command class.
The PositionAttr class
Description
This is the class for the Position attribute. This attribute is a scalar attribute and therefore inherits from the Attr base class. This class implements the read and is_allowed methods defined by the Attr class.
Definition
1 class PositionAttr: public Tango::Attr
2 {
3 public:
4 PositionAttr():Attr("Position",Tango::DEV_LONG,Tango::READ);
5 ~PositionAttr() {};
6
7 virtual void read(Tango::DeviceImpl *dev,Tango::Attribute &att)
8 {(static_cast<StepperMotor *>(dev))->read_Position(att);}
9 virtual bool is_allowed(Tango::DeviceImpl *dev,Tango::AttReqType ty)
10 {return (static_cast<StepperMotor *>(dev))->is_Position_allowed(ty);}
11 };
Line 1 : The class is a sub class of the Attr class
Line 4-5 : Class constructor and destructor
Line 7 : Re-definition of the read method defined in the Attr class. This is simply a forward to the read_Position method of the StepperMotor class
Line 9 : Re-definition of the is_allowed method defined in the Attr class. This is also a forward to the is_Position_allowed method of the StepperMotor class
Startup of a device pattern
To start the device pattern implementation for stepper motor device, four methods of the StepperMotorClass class must be executed. These methods are :
The creation of the StepperMethodClass singleton via its init() method
The command_factory() method of the StepperMotorClass class
The attribute_factory() method of the StepperMotorClass class. This method has a default empty body for device class without attributes.
The device_factory() method of the StepperMotorClass class
This startup procedure is described in figure 6.2
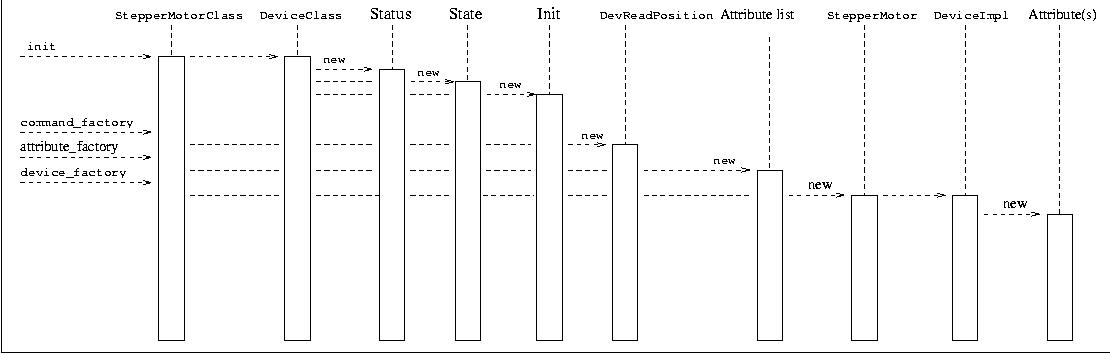
Figure 6.2: Device pattern startup sequence
. The creation of the StepperMotorClass will automatically create an instance of the DeviceClass class. The constructor of the DeviceClass class will create the Status, State and Init command objects and store them in its command list.
The command_factory() method will simply create all the user defined commands and add them in the command list.
The attribute_factory() method will simply build a list of device attribute names.
The device_factory() method will create each StepperMotor object and store them in the StepperMotorClass instance device list. The list of devices to be created and their names is passed to the device_factory method in its input argument. StepperMotor is a sub-class of DeviceImpl class. Therefore, when a StepperMotor object is created, a DeviceImpl object is also created. The DeviceImpl constructor builds all the device attribute object(s) from the attribute list built by the attribute_factory() method.
Command execution sequence
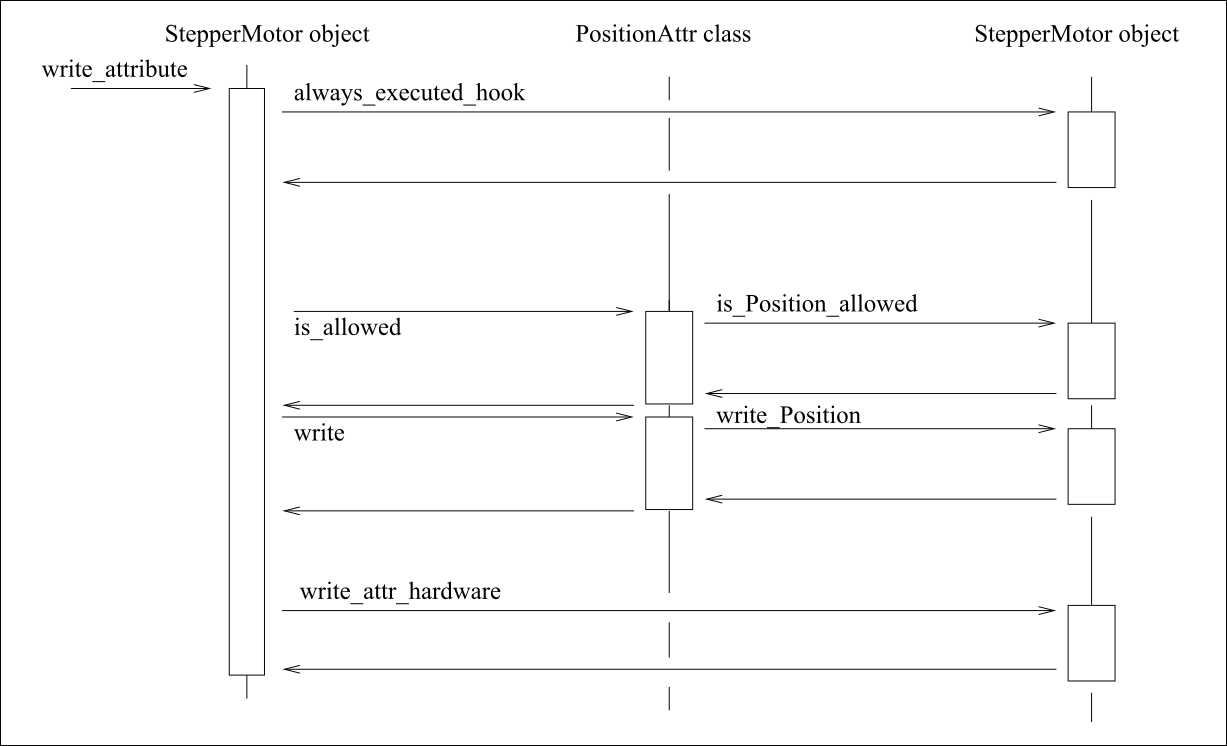
The figure 6.3
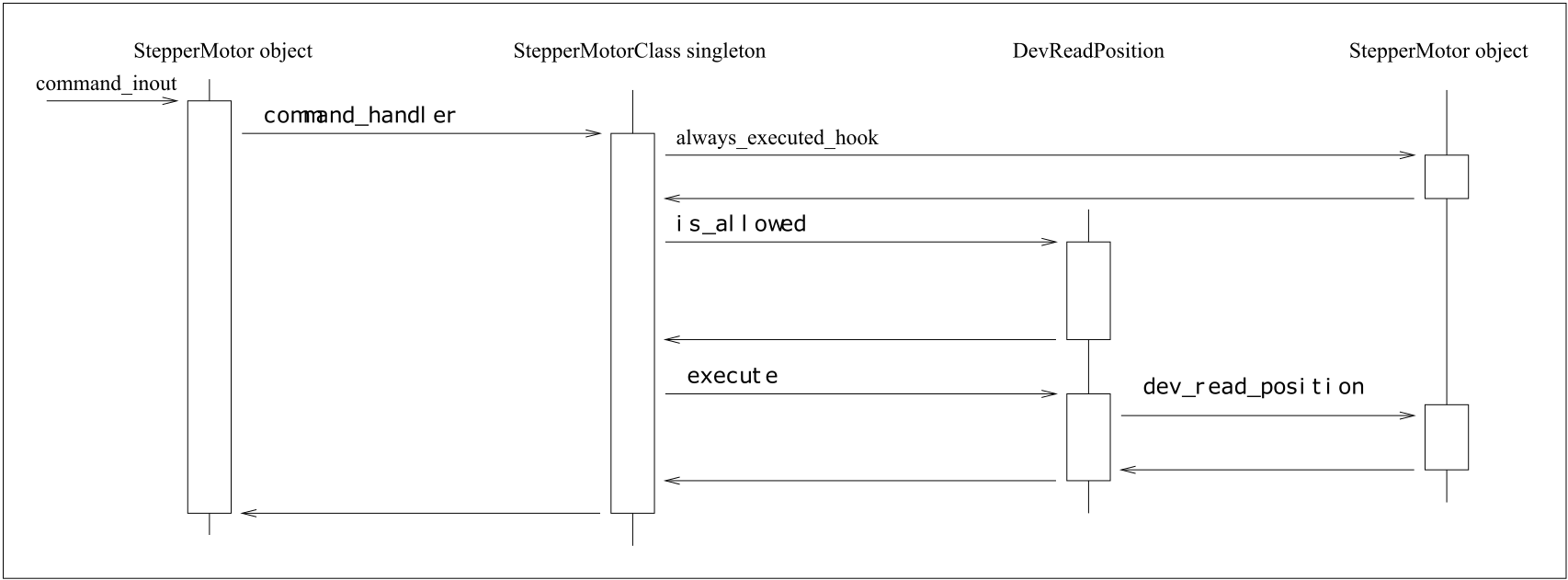
Figure 6.3: Command execution timing
described how the method implementing a command is executed when a command_inout CORBA operation is requested by a client. The command_inout method of the StepperMotor object (inherited from the DeviceImpl class) is triggered by an instance of a class generated by the CORBA IDL compiler. This method calls the command_handler() method of the StepperMotorClass object (inherited from the DeviceClass class). The command_handler method searches in its command list for the wanted command (using its name). If the command is found, the always_executed_hook method of the StepperMotor object is called. Then, the is_allowed method of the wanted command is executed. If the is_allowed method returns correctly, the execute method is executed. The execute method extracts the incoming data from the CORBA object use to transmit data over the network and calls the user written method which implements the command.
The automatically added commands
In order to increase the common behavior of every kind of devices in a TANGO control system, three commands are automatically added to each class of devices. These commands are :
State
Status
Init
The default behavior of the method called by the State command depends on the device state. If the device state is ON or ALARM, the method will :
read the attribute(s) with an alarm level defined
check if the read value is above/below the alarm level and eventually change the device state to ALARM.
returns the device state.
For all the other device state, the method simply returns the device state stored in the DeviceImpl class. Nevertheless, the method used to return this state (called dev_state) is defined as virtual and can be redefined in DeviceImpl sub-class. The difference between the default State command and the state CORBA attribute is the ability of the State command to signal an error to the caller by throwing an exception.
The default behavior of the method called by the Status command depends on the device state. If the device state is ON or ALARM, the method returns the device status stored in the DeviceImpl class plus additional message(s) for all the attributes which are in alarm condition. For all the other device state, the method simply returns the device status as it is stored in the DeviceImpl class. Nevertheless, the method used to return this status (called dev_status) is defined as virtual and can be redefined in DeviceImpl sub-class. The difference between the default Status command and the status CORBA attribute is the ability of the Status command to signal an error to the caller by throwing an exception.
The Init command is used to re-initialize a device without changing its network connection. This command calls the device delete_device method and the device init_device method. The rule of the delete_device method is to free memory allocated in the init_device method in order to avoid memory leak.
Reading/Writing attributes
Reading attributes
A Tango client is able to read Tango attribute(s) with the CORBA read_attributes call. Inside the device server, this call will trigger several methods of the device class (StepperMotor in our example) :
The always_executed_hook() method.
A method call read_attr_hardware(). This method is called one time per read_attributes CORBA call. The aim of this method is to read the device hardware and to store the result in a device class data member.
For each attribute to be read
A method called is_<att name>_allowed(). The rule of this method is to allow (or disallow) the next method to be executed. It is usefull for device with some attributes which can be read only in some precise conditions. It has one parameter which is the request type (read or write)
A method called read_<att name>(). The aim of this method is to extract the real attribute value from the hardware read-out and to store the attribute value into the attribute object. It has one parameter which is a reference to the Attribute object to be read.
The figure 6.4 is a drawing of these method calls sequencing. For attribute always readable, a default is_allowed method is provided. This method always returns true.
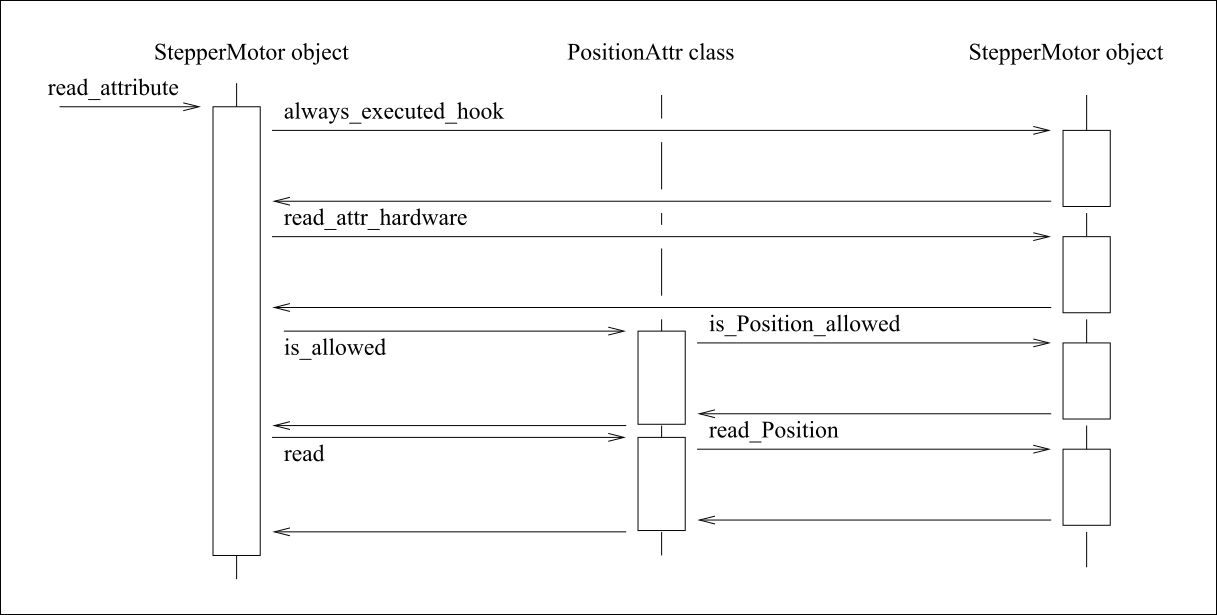
Figure 6.4: Read attribute sequencing
Writing attributes
A Tango client is able to write Tango attribute(s) with the CORBA write_attributes call. Inside a device server, this call will trigger several methods of the device class (StepperMotor in our example)
The always_executed_hook() method.
For each attribute to be written
A method called is_<att name>_allowed(). The rule of this method is to allow (or disallow) the next method to be executed. It is usefull for device with some attributes which can be written only in some precise conditions. It has one parameter which is the request type (read or write)
A method called write_<att name>(). It has one parameter which is a reference to the WAttribute object to be written. The aim of this method is to get the data to be written from the WAttribute object and to write this value into the corresponding hardware. If the hardware support writing several data in one go, code the hardware access in the write_attr_harware() method.
The write_attr_hardware() method. The rule of this method is to effectively write the hardware in case it is able to support writing several data in one go. If this is not the case, don’t code this method (a default implementation is coded in the Tango base class) and code the real hardware access in each write_<att name>() method.
The figure 6.5 is a drawing of these method calls sequencing. For attribute always writeable, a default is_allowed method is provided. This method always allways returns true.
Write attribute sequencing
The device server framework
Vocabulary
A device server pattern implementation is embedded in a process called a device server. Several instances of the same device server process can be used in a TANGO control system. To identify instances, a device server process is started with an instance name which is different for each instance. The device server name is the couple device server executable name/device server instance name. For instance, a device server started with the following command
Perkin id11
starts a device server process with an instance name id11, an executable name Perkin and a device server name Perkin/id11.
The DServer class
In order to simplify device server process administration, a device of the DServer class is automatically added to each device server process. Thus, every device server process supports the same set of administration commands. The implementation of this DServer class follows the device pattern and therefore, its device behaves like any other devices. The device name is
dserver/device server executable name/device server instance name
For instance, for the device server process described in chapter [Voc], the dserver device name is dserver/perkin/id11. This name is returned by the adm_name CORBA attribute available for every device. On top of the three automatically added commands, this device supports the following commands :
DevRestart
RestartServer
QueryClass
QueryDevice
Kill
AddLoggingTarget (C++ server only)
RemoveLoggingTarget (C++ server only)
GetLoggingTarget (C++ server only)
GetLoggingLevel (C++ server only)
SetLoggingLevel (C++ server only)
StopLogging (C++ server only)
StartLogging (C++ server only)
PolledDevice
DevPollStatus
AddObjPolling
RemObjPolling
UpdObjPollingPeriod
StartPolling
StopPolling
EventSubscriptionChange
ZmqEventSubscriptionChange
LockDevice
UnLockDevice
ReLockDevices
DevLockStatus
These commands will be fully described later in this document.
Several controlled object classes can be embedded within the same device server process and it is the rule of this device to create all these device server patterns and to call their command and device factories as described in Startup of a device pattern. The name and number of all the classes to be created is known to this device after the execution of a method called class_factory. It is the user responsibility to write this method.
The Tango::Util class
Description
This class merges a complete set of utilities in the same class. It is implemented as a singleton and there is only one instance of this class per device server process. It is mandatory to create this instance in order to run a device server. The description of all the methods implemented in this class can be found in [TangoRefMan].
Contents
Within this class, you can find :
Static method to create/retrieve the singleton object
Miscellaneous utility methods like getting the server output trace level, getting the CORBA ORB pointer, retrieving device server instance name, getting the server PID and more. Please, refer to [TangoRefMan] to get a complete list of all these utility methods.
Method to create the device pattern implementing the DServer class (server_init())
Method to start the server (server_run())
TANGO database related methods
A complete device server
Within a complete device server, at least two implementations of the device server pattern are created (one for the dserver object and the other for the class of devices to control). On top of that, one instance of the Tango::Util class must also be created.
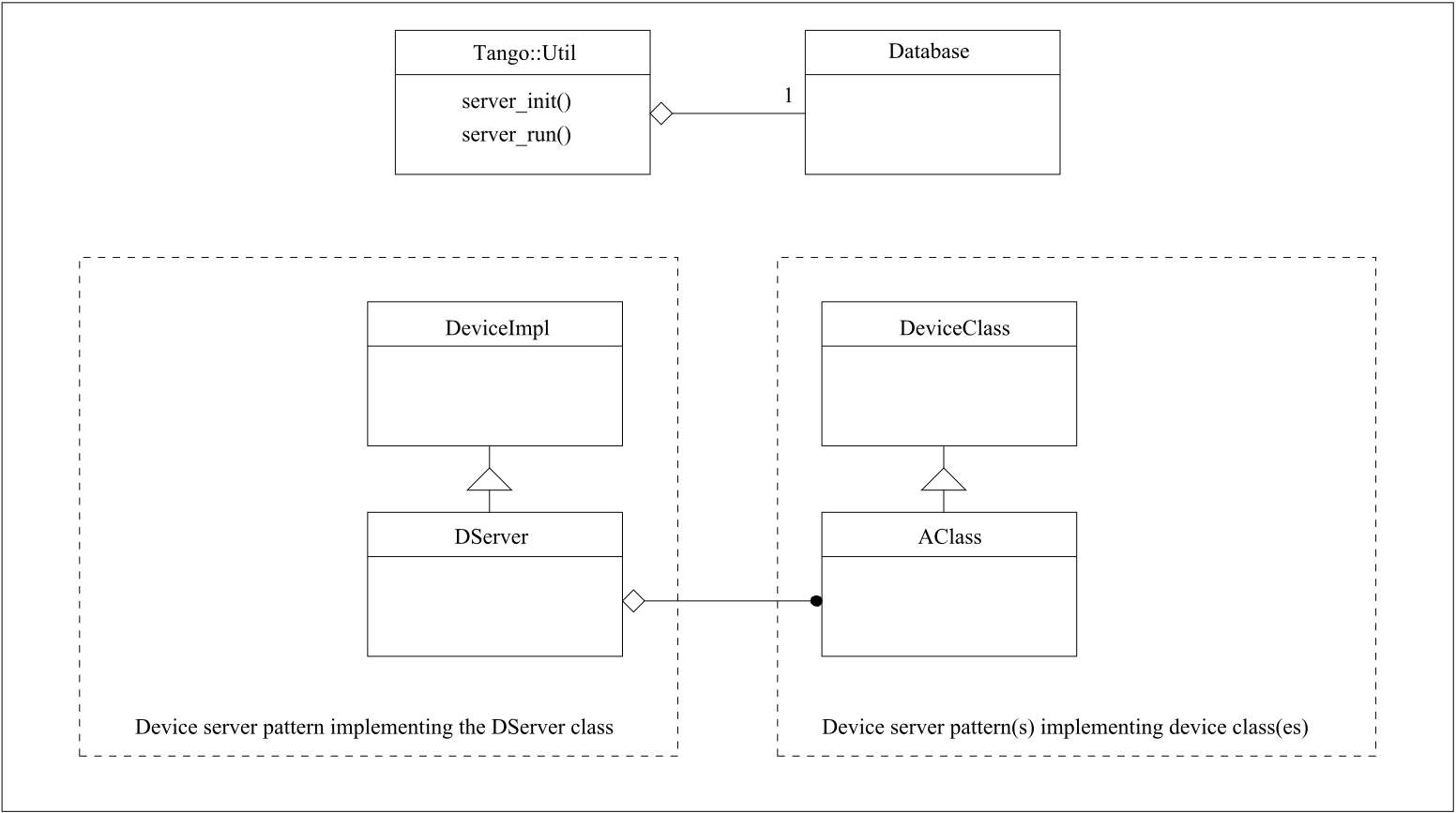
Figure 6.6: A complete device server
A drawing of a complete device server is in figure 6.6
Device server startup sequence
The device server startup sequence is the following :
Create an instance of the Tango::Util class. This will initialize the CORBA Object Request Broker
Called the server_init method of the Tango::Util instance The call to this method will :
Create the DServerClass object of the device pattern implementing the DServer class. This will create the dserver object which during its construction will :
Called the class_factory method of the DServer object. This method must create all the xxxClass instance for all the device pattern implementation embedded in the device server process.
Call the command_factory and device_factory of all the classes previously created. The list of devices passed to each call to the device_factory method is retrieved from the TANGO database.
Wait for incoming request with the server_run() method of the Tango::Util class.
Exchanging data between client and server
Exchanging data between clients and server means most of the time passing data between processes running on different computer using the network. Tango limits the type of data exchanged between client and server and defines a way to exchange these data. This chapter details these features. Memory allocation and error reporting are also discussed.
All the rules described in this chapter are valid only for data exchanged between client and server. For device server internal data, classical C++ types can be used.
Command / Attribute data types
Commands have a fixed calling syntax - consisting of one input argument and one output argument. Arguments type must be chosen out of a fixed set of 24 data types. Attributes support a sub-set of these data types (those are the data type with the (1) note) plus the DevEnum data type. The following table details type name, code and the corresponding CORBA IDL types.
The type name used in the type name column of this table is the C++ name. In the IDL file, all the Tango definition are grouped in a IDL module named Tango. The IDL module maps to C++ namespace. Therefore, all the data type are parts of a namespace called Tango.
Type name |
IDL type |
|---|---|
Tango::DevBoolean (1) |
boolean |
Tango::DevShort (1) |
short |
Tango::DevEnum (2) |
short (See chapter on advanced features) |
Tango::DevLong (1) |
long |
Tango::DevLong64 (1) |
long long |
Tango::DevFloat (1) |
float |
Tango::DevDouble (1) |
double |
Tango::DevUShort (1) |
unsigned short |
Tango::DevULong (1) |
unsigned long |
Tango::DevULong64 (1) |
unsigned long long |
Tango::DevString (1) |
string |
Tango::DevVarCharArray |
sequence of unsigned char |
Tango::DevVarShortArray |
sequence of short |
Tango::DevVarLongArray |
sequence of long |
Tango::DevVarLong64Array |
sequence of long long |
Tango::DevVarFloatArray |
sequence of float |
Tango::DevVarDoubleArray |
sequence of double |
Tango::DevVarUShortArray |
sequence of unsigned short |
Tango::DevVarULongArray |
sequence of unsigned long |
Tango::DevVarULong64Array |
sequence of unsigned long long |
Tango::DevVarStringArray |
sequence of string |
Tango::DevVarLongStringArray |
structure with a sequence of long and a sequence of string |
Tango::DevVarDoubleStringArray |
structure with a sequence of double and a sequence of string |
Tango::DevState (1) |
enumeration |
Tango::DevEncoded (1) |
structure with a string and a sequence of char |
The CORBA Interface Definition Language uses a type called sequence for variable length array. The Tango::DevUxxx types are used for unsigned types. The Tango::DevVarxxxxArray must be used when the data to be transferred are variable length array. The Tango::DevVarLongStringArray and Tango::DevVarDoubleStringArray are structures with two fields which are variable length array of Tango long (32 bits) and variable length array of strings for the Tango::DevVarLongStringArray and variable length array of double and variable length array of string for the Tango::DevVarDoubleStringArray. The Tango::State type is used by the State command to return the device state.
Using data types with C++
Unfortunately, the mapping between IDL and C++ was defined before the C++ class library had been standardized. This explains why the standard C++ string class or vector classes are not used in the IDL to C++ mapping.
TANGO commands/attributes argument types can be grouped on five groups depending on the IDL data type used. These groups are :
Data type using basic types (Tango::DevBoolean, Tango::DevShort, Tango::DevEnum, Tango::DevLong, Tango::DevFloat, Tango::DevDouble, Tango::DevUshort and Tango::DevULong)
Data type using strings (Tango::DevString type)
Data types using sequences (Tango::DevVarxxxArray types except Tango::DevVarLongStringArray and Tango::DevVarDoubleStringArray)
Data types using structures (Tango::DevVarLongStringArray and Tango::DevVarDoubleStringArray types)
Data type using IDL enumeration (Tango::DevState type)
In the following sub chapters, only summaries of the IDL to C++ mapping are given. For a full description of the C++ mapping, please refer to [Henning].
Basic types
For these types, the mapping between IDL and C++ is obvious and defined in the following table.
Tango type name |
IDL type |
C++ |
typedef |
|---|---|---|---|
Tango::DevBoolean |
boolean |
CORBA::Boolean |
unsigned char |
Tango::DevShort |
short |
CORBA::Short |
short |
Tango::DevEnum |
short |
CORBA::Short |
|
Tango::DevLong |
long |
CORBA::Long |
int |
Tango::DevLong64 |
long long |
CORBA::LongLong |
long long or long (64 bits chip) |
Tango::DevFloat |
float |
CORBA::Float |
float |
Tango::DevDouble |
double |
CORBA::Double |
double |
Tango::DevUShort |
unsigned short |
CORBA::UShort |
unsigned short |
Tango::DevULong |
unsigned long |
CORBA::ULong |
unsigned long |
Tango::DevULong64 |
unsigned long long |
CORBA:ULongLong |
unsigned long long or unsigned long (64 bits chip) |
The types defined in the column named C++ should be used for a better portability. All these types are defined in the CORBA namespace and therefore their qualified names is CORBA::xxx. The Tango data type DevEnum is a special case described in detail in the chapter about advanced features.
Strings
Strings are mapped to char *. The use of new and delete for dynamic allocation of strings is not portable. Instead, you must use helper functions defined by CORBA (in the CORBA namespace) and Tango. These functions are :
1 char *CORBA::string_alloc(unsigned long len);
2 char *Tango::string_dup(const char *);
3 void Tango::string_free(char *);
These functions handle dynamic memory for strings. The string_alloc function allocates one more byte than requested by the len parameter (for the trailing 0). The function string_dup combines the allocation and copy. Both string_alloc and string_dup return a null pointer if allocation fails. The string_free function must be used to free memory allocated with string_alloc and string_dup. Calling string_free for a null pointer is safe and does nothing. Tango::string_free is available only since cppTango 9.3.3. Tango::string_dup is available only since Tango 9. If you are using an older version of the Tango C++ library, you should use CORBA::string_free and CORBA::string_dup instead. The following code fragment is an example of the Tango::DevString type usage :
1 Tango::DevString str = CORBA::string_alloc(5);
2 strcpy(str,"TANGO");
3
4 Tango::DevString str1 = Tango::string_dup("Do you want to danse TANGO?");
5
6 Tango::string_free(str);
7 Tango::string_free(str1);
Line 1-2 : TANGO is a five letters string. The CORBA::string_alloc function parameter is 5 but the function allocates 6 bytes
Line 4 : Example of the Tango::string_dup function
Line 6-7 : Memory deallocation
Sequences
IDL sequences are mapped to C++ classes that behave like vectors with a variable number of elements. Each IDL sequence type results in a separate C++ class. Within each class representing a IDL sequence types, you find the following method (only the main methods are related here) :
Four constructors.
A default constructor which creates an empty sequence.
The maximum constructor which creates a sequence with memory allocated for at least the number of elements passed as argument. This does not limit the number of element in the sequence but only the way how memory is allocated to store element
A sophisticated constructor where it is possible to assign the memory used by the sequence with a preallocated buffer.
A copy constructor which does a deep copy
An assignment operator which does a deep copy
A length accessor which simply returns the current number of elements in the sequence
A length modifier which changes the length of the sequence (which is different than the number of elements in the sequence)
Overloading of the [] operator. The subscript operator [] provides access to the sequence element. For a sequence containing elements of type T, the [] operator is overloaded twice to return value of type T & and const T &. Insertion into a sequence using the [] operator for the const T & make a deep copy. Sequence are numbered between 0 and length() -1.
Note that using the maximum constructor will not prevent you from setting the length of the sequence with a call to the length modifier. The following code fragment is an example of how to use a Tango::DevVarLongArray type
1 Tango::DevVarLongArray *mylongseq_ptr;
2 mylongseq_ptr = new Tango::DevVarLongArray();
3 mylongseq_ptr->length(4);
4
5 (*mylongseq_ptr)[0] = 1;
6 (*mylongseq_ptr)[1] = 2;
7 (*mylongseq_ptr)[2] = 3;
8 (*mylongseq_ptr)[3] = 4;
9
10 // (*mylongseq_ptr)[4] = 5;
11
12 CORBA::Long nb_elt = mylongseq_ptr->length();
13
14 mylongseq_ptr->length(5);
15 (*mylongseq_ptr)[4] = 5;
16
17 for (int i = 0;i < mylongseq_ptr->length();i++)
18 cout << "Sequence elt " << i + 1 << " = " << (*mylongseq_ptr)[i] << endl;
Line 1 : Declare a pointer to Tango::DevVarLongArray type which is a sequence of long
Line 2 : Create an empty sequence
Line 3 : Change the length of the sequence to 4
Line 5 - 8 : Initialize sequence elements
Line 10 ; Oups !!! The length of the sequence is 4. The behavior of this line is undefined and may be a core can be dumped at run time
Line 12 : Get the number of element actually stored in the sequence
Line 14-15 : Grow the sequence to five elements and initialize element number 5
Line 17-18 : Print sequence element
Another example for the Tango::DevVarStringArray type is given
1 Tango::DevVarStringArray mystrseq(4);
2 mystrseq.length(4);
3
4 mystrseq[0] = Tango::string_dup("Rock and Roll");
5 mystrseq[1] = Tango::string_dup("Bossa Nova");
6 mystrseq[2] = Tango::string_dup("Waltz");
7 mystrseq[3] = Tango::string_dup("Tango");
8
9 CORBA::Long nb_elt = mystrseq.length();
10
11 for (int i = 0;i < mystrseq.length();i++)
12 cout << "Sequence elt " << i + 1 << " = " << mystrseq[i] << endl;
Line 1 : Create a sequence using the maximum constructor
Line 2 : Set the sequence length to 4. This is mandatory even if you used the maximum constructor.
Line 4-7 : Populate the sequence
Line 9 : Get how many strings are stored into the sequence
Line 11-12 : Print sequence elements.
Structures
Only three TANGO types are defined as structures. These types are the Tango::DevVarLongStringArray, the Tango::DevVarDoubleStringArray and the Tango::DevEncoded data type. IDL structures map to C++ structures with corresponding members. For the Tango::DevVarLongStringArray, the two members are named svalue for the sequence of strings and lvalue for the sequence of longs. For the Tango::DevVarDoubleStringArray, the two structure members are called svalue for the sequence of strings and dvalue for the sequence of double. For the Tango::DevEncoded, the two structure members are called encoded_format for a string describing the data coding and encoded_data for the data themselves. The encoded_data field type is a Tango::DevVarCharArray. An example of the usage of the Tango::DevVarLongStringArray type is detailed below.
1 Tango::DevVarLongStringArray my_vl;
2
3 myvl.svalue.length(2);
4 myvl.svalue[0] = CORBA_string_dup("Samba");
5 myvl.svalue[1] = CORBA_string_dup("Rumba");
6
7 myvl.lvalue.length(1);
8 myvl.lvalue[0] = 10;
Line 1 : Declaration of the structure
Line 3-5 : Initialization of two strings in the sequence of string member
Line 7-8 : Initialization of one long in the sequence of long member
The DevState data type
The Tango::DevState data type is used to transfer device state between client and server. It is a IDL enumeration. IDL enumerated types map to C++ enumerations (amazing no!) with a trailing dummy enumerator to force enumeration to be a 32 bit type. The first enumerator will have the value 0, the next one will have the value 1 and so on.
1 Tango::DevState state;
2
3 state = Tango::ON;
4 state = Tango::FAULT;
Passing data between client and server
In order to have one definition of the CORBA operation used to send a command to a device whatever the command data type is, TANGO uses CORBA IDL any object. The IDL type any provides a universal type that can hold a value of arbitrary IDL types. Type any therefore allows you to send and receive values whose types are not fixed at compile time.
Type any is often compared to a void * in C. Like a pointer to void, an any value can denote a datum of any type. However, there is an important difference; whereas a void * denotes a completely untyped value that can be interpreted only with advance knowledge of its type, values of type any maintain type safety. For example, if a sender places a string value into an any, the receiver cannot extract the string as a value of the wrong type. Attempt to read the contents of an any as the wrong type cause a run-time error.
Internally, a value of type any consists of a pair of values. One member of the pair is the actual value contained inside the any and the other member of the pair is the type code. The type code is a description of the value’s type. The type description is used to enforce type safety when the receiver extracts the value. Extraction of the value succeeds only if the receiver extracts the value as a type that matches the information in the type code.
Within TANGO, the command input and output parameters are objects of the IDL any type. Only insertion/extraction of all types defined as command data types is possible into/from these any objects.
C++ mapping for IDL any type
The IDL any maps to the C++ class CORBA::Any. This class contains a large number of methods with mainly methods to insert/extract data into/from the any. It provides a default constructor which builds an any which contains no value and a type code that indicates “no value”. Such an any must be used for command which does not need input or output parameter. The operator <<= is overloaded many times to insert data into an any object. The operator >>= is overloaded many times to extract data from an any object.
Inserting/Extracting TANGO basic types
The insertion or extraction of TANGO basic types is straight forward using the <<= or >>= operators. Nevertheless, the Tango::DevBoolean type is mapped to a unsigned char and other IDL types are also mapped to char C++ type (The unsigned is not taken into account in the C++ overloading algorithm). Therefore, it is not possible to use operator overloading for these IDL types which map to C++ char. For the Tango::DevBoolean type, you must use the CORBA::Any::from_boolean or CORBA::Any::to_boolean intermediate objects defined in the CORBA::Any class.
Inserting/Extracting TANGO strings
The <<= operator is overloaded for const char * and always makes a deep copy. This deep copy is done using the Tango::string_dup function. The extraction of strings uses the >>= overloaded operator. The main point is that the Any object retains ownership of the string, so the returned pointer points at memory inside the Any. This means that you must not deallocate the extracted string and you must treat the extracted string as read-only.
Inserting/Extracting TANGO sequences
Insertion and extraction of sequences also uses the overloaded <<= and >>= operators. The insertion operator is overloaded twice: once for insertion by reference and once for insertion by pointer. If you insert a value by reference, the insertion makes a deep copy. If you insert a value by pointer, the Any assumes the ownership of the pointed-to memory.
Extraction is always by pointer. As with strings, you must treat the extracted pointer as read-only and must not deallocate it because the pointer points at memory internal to the Any.
Inserting/Extracting TANGO structures
This is identical to inserting/extracting sequences.
Inserting/Extracting TANGO enumeration
This is identical to inserting/extracting basic types
1 CORBA::Any a;
2 Tango::DevLong l1,l2;
3 l1 = 2;
4 a <<= l1;
5 a >>= l2;
6
7 CORBA::Any b;
8 Tango::DevBoolean b1,b2;
9 b1 = true;
10 b <<= CORBA::Any::from_boolean(b1);
11 b >>= CORBA::Any::to_boolean(b2);
12
13 CORBA::Any s;
14 Tango::DevString str1,str2;
15 str1 = "I like dancing TANGO";
16 s <<= str1;
17 s >>= str2;
18
19 // Tango::string_free(str2);
20 // a <<= Tango::string_dup("Oups");
21
22 CORBA::Any seq;
23 Tango::DevVarFloatArray fl_arr1;
24 fl_arr1.length(2);
25 fl_arr1[0] = 1.0;
26 fl_arr1[1] = 2.0;
27 seq <<= fl_arr1;
28 const Tango::DevVarFloatArray *fl_arr_ptr;
29 seq >>= fl_arr_ptr;
30
31 // delete fl_arr_ptr;
Line 1-5 : Insertion and extraction of Tango::DevLong type
Line 7-11 Insertion and extraction of Tango::DevBoolean type using the CORBA::Any::from_boolean and CORBA::Any::to_boolean intermediate structure
Line 13-17 : Insertion and extraction of Tango::DevString type
Line 19 : Wrong ! You should not deallocate a string extracted from an any
Line 20 : Wrong ! Memory leak because the <<= operator will do the copy.
Line 22-29 : Insertion and extraction of Tango::DevVarxxxArray types. This is an insertion by reference and the use of the <<= operator makes a deep copy of the sequence. Therefore, after line 27, it is possible to deallocate the sequence
Line 31: Wrong.! You should not deallocate a sequence extracted from an any
The insert and extract methods of the Command class
In order to simplify the insertion/extraction into/from Any objects, small helper methods have been written in the Command class. The signatures of these methods are :
1 void extractextract(const CORBA::Any &,<Tango type> &);
2 CORBA::Any *insertinsert(<Tango type>);
An extract method has been written for all Tango types. These method extract the data from the Any object passed as parameter and throw an exception if the Any data type is incompatible with the awaiting type. An insert method have been written for all Tango types. These method create an Any object, insert the data into the Any and return a pointer to the created Any. For Tango types mapped to sequences or structures, two insert methods have been written: one for the insertion from pointer and the other for the insertion from reference. For Tango strings, two insert methods have been written: one for insertion from a classical Tango::DevString type and the other from a const Tango::DevString type. The first one deallocate the memory after the insert into the Any object. The second one only inserts the string into the Any object.
The previous example can be rewritten using the insert/extract helper methods (We suppose that we can use the Command class insert/extract methods)
1 Tango::DevLong l1,l2;
2 l1 = 2;
3 CORBA::Any *a_ptr = insert(l1);
4 extract(*a_ptr,l2);
5
6 Tango::DevBoolean b1,b2;
7 b1 = true;
8 CORBA::Any *b_ptr = insert(b1);
9 extract(*b_ptr,b2);
10
11 Tango::DevString str1,str2;
12 str1 = "I like dancing TANGO";
13 CORBA::Any *s_ptr = insert(str1);
14 extract(*s_ptr,str2);
15
16 Tango::DevVarFloatArray fl_arr1;
17 fl_arr1.length(2);
18 fl_arr1[0] = 1.0;
19 fl_arr1[1] = 2.0;
20 insert(fl_arr1);
21 CORBA::Any *seq_ptr = insert(fl_arr1);
22 Tango::DevVarFloatArray *fl_arr_ptr;
23 extract(*seq_ptr,fl_arr_ptr);
Line 1-4 : Insertion and extraction of Tango::DevLong type
Line 6-9 : Insertion and extraction of Tango::DevBoolean type
Line 11-14 : Insertion and extraction of Tango::DevString type
Line 16-23 : Insertion and extraction of Tango::DevVarxxxArray types. This is an insertion by reference which makes a deep copy of the sequence. Therefore, after line 20, it is possible to deallocate the sequence
C++ memory management
The rule described here are valid for variable length command data types like Tango::DevString or all the Tango:: DevVarxxxxArray types.
The method executing the command must allocate the memory used to pass data back to the client or use static memory (like buffer declares as object data member. If necessary, the ORB will deallocate this memory after the data have been sent to the caller. Fortunately, for incoming data, the method have no memory management responsibilities. The details about memory management given in this chapter assume that the insert/extract methods of the Tango::Command class are used and only the method in the device object is discussed.
For string
Example of a method receiving a Tango::DevString and returning a Tango::DevString is detailed just below
1 Tango::DevString MyDev::dev_string(Tango::DevString argin)
2 {
3 Tango::DevString argout;
4
5 cout << "the received string is " << argin << endl;
6
7 string str("Am I a good Tango dancer ?");
8 argout = new char[str.size() + 1];
9 strcpy(argout,str.c_str());
10
11 return argout;
12 }
Note that there is no need to deallocate the memory used by the incoming string. Memory for the outgoing string is allocated at line 8, then it is initialized at the following line. The memory allocated at line 8 will be automatically freed by the usage of the Command::insert() method. Using this schema, memory is allocated/freed each time the command is executed. For constant string length, a statically allocated buffer can be used.
1 Tango::ConstDevString MyDev::dev_string(Tango::DevString argin)
2 {
3 Tango::ConstDevString argout;
4
5 cout << "the received string is " << argin << endl;
6
7 argout = "Hello world";
8 return argout;
9 }
A Tango::ConstDevString data type is used. It is not a new data Tango data type. It has been introduced only to allows Command::insert() method overloading. The argout pointer is initialized at line 7 with memory statically allocated. In this case, no memory will be freed by the Command::insert() method. There is also no memory copy in the contrary of the previous example. A buffer defined as object data member can also be used to set the argout pointer.
For array/sequence
Example of a method returning a Tango::DevVarLongArray is detailed just below
1 Tango::DevVarLongArray *MyDev::dev_array()
2 {
3 Tango::DevVarLongArray *argout = new Tango::DevVarLongArray();
4
5 long output_array_length = ...;
6 argout->length(output_array_length);
7 for (int i = 0;i < output_array_length;i++)
8 (*argout)[i] = i;
9
10 return argout;
11 }
In this case, memory is allocated at line 3 and 6. Then, the sequence is populated. The sequence is created and returned using pointer. The Command::insert() method will insert the sequence into the CORBA::Any object using this pointer. Therefore, the CORBA::Any object will take ownership of the allocated memory. It will free it when it will be destroyed by the CORBA ORB after the data have been sent away. It is also possible to use a statically allocated memory and to avoid copying in the sequence used to returned the data. This is explained in the following example assuming a buffer of long data is declared as device data member and named buffer.
1 Tango::DevVarLongArray *MyDev::dev_array()
2 {
3 Tango::DevVarLongArray *argout;
4
5 long output_array_length = ...;
6 argout = create_DevVarLongArray(buffer,output_array_length);
7 return argout;
8 }
At line 3 only a pointer to a DevVarLongArray is defined. This pointer is set at line 6 using the create_DevVarLongArray() method. This method will create a sequence using this buffer without memory allocation and with minimum copying. The Command::insert() method used here is the same than the one used in the previous example. The sequence is created in a way that the destruction of the CORBA::Any object in which the sequence will be inserted will not destroy the buffer. The following create_xxx methods are defined in the DeviceImpl class :
Method name |
data type |
|---|---|
create_DevVarCharArray() |
unsigned char |
create_DevVarShortArray() |
short |
create_DevVarLongArray() |
DevLong |
create_DevVarLong64Array() |
DevLong64 |
create_DevVarFloatArray() |
float |
create_DevVarDoubleArray() |
double |
create_DevVarUShortArray() |
unsigned short |
create_DevVarULongArray() |
DevULong |
create_DevVarULong64Array() |
DevULong64 |
For string array/sequence
Example of a method returning a Tango::DevVarStringArray is detailed just below
1 Tango::DevVarStringArray *MyDev::dev_str_array()
2 {
3 Tango::DevVarStringArray *argout = new Tango::DevVarStringArray();
4
5 argout->length(3);
6 (*argout)[0] = Tango::string_dup("Rumba");
7 (*argout)[1] = Tango::string_dup("Waltz");
8 string str("Jerck");
9 (*argout)[2] = Tango::string_dup(str.c_str());
10 return argout;
11 }
Memory is allocated at line 3 and 5. Then, the sequence is populated at lines 6,7 and 9. The usage of the Tango::string_dup function also allocates memory. The sequence is created and returned using pointer. The Command::insert() method will insert the sequence into the CORBA::Any object using this pointer. Therefore, the CORBA::Any object will take ownership of the allocated memory. It will free it when it will be destroyed by the CORBA ORB after the data have been sent away. For portability reason, the ORB uses the CORBA::string_free function to free the memory allocated for each string. This is why the corresponding Tango::string_dup or CORBA::string_alloc function must be used to reserve this memory.It is also possible to use a statically allocated memory and to avoid copying in the sequence used to returned the data. This is explained in the following example assuming a buffer of pointer to char is declared as device data member and named int_buffer.
1 Tango::DevVarStringArray *DocDs::dev_str_array()
2 {
3 int_buffer[0] = "first";
4 int_buffer[1] = "second";
5
6 Tango::DevVarStringArray *argout;
7 argout = create_DevVarStringArray(int_buffer,2);
8 return argout;
9 }
The intermediate buffer is initialized with statically allocated memory at lines 3 and 4. The returned sequence is created at line 7 with the create_DevVarStringArray() method. Like for classical array, the sequence is created in a way that the destruction of the CORBA::Any object in which the sequence will be inserted will not destroy the buffer.
For Tango composed types
Tango supports only two composed types which are Tango::DevVarLongStringArray and Tango::DevVarDoubleStringArray. These types are translated to C++ structure with two sequences. It is not possible to use memory statically allocated for these types. Each structure element must be initialized as described in the previous sub-chapters using the dynamically allocated memory case.
Reporting errors
Tango uses the C++ try/catch plus exception mechanism to report errors. Two kind of errors can be transmitted between client and server :
CORBA system error. These exceptions are raised by the ORB and indicates major failures (A communication failure, An invalid object reference…)
CORBA user exception. These kind of exceptions are defined in the IDL file. This allows an exception to contain an arbitrary amount of error information of arbitrary type.
TANGO defines one user exception called DevFailed. This exception is a variable length array of DevError type (a sequence of DevError). The DevError type is a four fields structure. These fields are :
A string describing the type of the error. This string replaces an error code and allows a more easy management of include files.
The error severity. It is an enumeration with the three values which are WARN, ERR or PANIC.
A string describing in plain text the reason of the error
A string describing the origin of the error
The Tango::DevFailed type is a sequence of DevError structures in order to transmit to the client what is the primary error reason when several classes are used within a command. The sequence element 0 must be the DevError structure describing the primary error. A method called print_exception() defined in the Tango::Except class prints the content of exception (CORBA system exception or Tango::DevFailed exception). Some static methods of the Tango::Except class called throw_exception() can be used to throw Tango::DevFailed exception. Some other static methods called re_throw_exception() may also be used when the user want to add a new element in the exception sequence and re-throw the exception. Details on these methods can be found in [TangoRefMan].
Example of throwing exception
This example is a piece of code from the command_handler() method of the DeviceImpl class. An exception is thrown to the client to indicate that the requested command is not defined in the command list.
1 TangoSys_OMemStream o;
2
3 o << "Command " << command << " not found" << ends;
4 Tango::Except::throw_exception("API_CommandNotFound",
5 o.str(),
6 "DeviceClass::command_handler");
7
8
9 try
10 {
11 .....
12 }
13 catch (Tango::DevFailed &e)
14 {
15 TangoSys_OMemStream o;
16
17 o << "Command " << command << " not found" << ends;
18 Tango::Except::re_throw_exception(e,
19 "API_CommandNotFound",
20 o.str(),
21 "DeviceClass::command_handler");
22 }
Line 1 : Build a memory stream. Use the TangoSys_MemStream because memory streams are not managed the same way between Windows and Unix
Line 3 : Build the reason string in the memory stream
Line 4-5 : Throw the exception to client using one of the throw_exception static method of the Except class. This throw_exception method used here allows the definition of the error type string, the reason string and the origin string of the DevError structure. The remaining DevError field (the error severity) will be set to its default value. Note that the first and third parameters are casted to a const char *. Standard C++ defines that such a string is already a const char * but the GNU C++ compiler (release 2.95) does not use this type inside its function overloading but rather uses a char * which leads to calling the wrong function.
Line 13-22 : Re-throw an already catched tango::DevFailed exception with one more element in the exception sequence.
The Tango Logging Service
A first introduction about this logging service has been done in chapter [sec:The-Tango-Logging]
The TANGO Logging Service (TLS) gives the user the control over how much information is actually generated and to where it goes. In practice, the TLS allows to select both the logging level and targets of any device within the control system.
Logging Targets
The TLS implementation allows each device logging requests to print simultaneously to multiple destinations. In the TANGO terminology, an output destination is called a logging target. Currently, targets exist for console, file and log consumer device.
CONSOLE: logs are printed to the console (i.e. the standard output),
FILE: logs are stored in a XML file. A rolling mechanism is used to backup the log file when it reaches a certain size (see below),
DEVICE: logs are sent to a device implementing a well known TANGO interface (see section [sec:Tango-log-consumer] for a definition of the log consumer interface). One implementation of a log consumer associated to a graphical user interface is available within the Tango package. It is called the LogViewer.
The device’s logging behavior can be control by adding and/or removing targets.
Note : When the size of a log file (for file logging target) reaches the so-called rolling-file-threshold (rft), it is backuped as current_log_file_name + _1 and a new current_log_file_name is opened. Obviously, there is only one backup file at a time (i.e. any existing backup is destroyed before the current log file is backuped). The default threshold is 20 Mb, the minimum is 500 Kb and the maximum is 1000 Mb.
Logging Levels
Devices can be assigned a logging level. It acts as a filter to control the kind of information sent to the targets. Since, there are (usually) much more low level log statements than high level statements, the logging level also control the amount of information produced by the device. The TLS provides the following levels (semantic is just given to be indicative of what could be log at each level):
OFF: Nothing is logged
FATAL: A fatal error occurred. The process is about to abort
ERROR: An (unrecoverable) error occurred but the process is still alive
WARN: An error occurred but could be recovered locally
INFO: Provides information on important actions performed
DEBUG: Generates detailed information describing the internal behavior of a device
Levels are ordered the following way:
DEBUG < INFO < WARN < ERROR < FATAL < OFF
For a given device, a level is said to be enabled if it is greater or equal to the logging level assigned to this device. In other words, any logging request which level is lower than the device’s logging level is ignored.
Note: The logging level can’t be controlled at target level. The device’s targets shared the same device logging level.
Sending TANGO Logging Messages
Logging macros in C++
The TLS provides the user with easy to use C++ macros with printf and stream like syntax. For each logging level, a macro is defined in both styles:
LOG_{FATAL, ERROR, WARN, INFO or DEBUG}
{FATAL, ERROR, WARN, INFO or DEBUG}_STREAM
These macros are supposed to be used within the device’s main implementation class (i.e. the class that inherits (directly or indirectly) from the Tango::DeviceImpl class). In this context, they produce logging messages containing the device name. In other words, they automatically identify the log source. Section [sub:C++-logging-in] gives a trick to log in the name of device outside its main implementation class. Printf like example:
LOG_DEBUG((Msg#%d - Hello world, i++));
Stream like example:
DEBUG_STREAM << Msg# << i++ << - Hello world << endl;
These two logging requests are equivalent. Note the double parenthesis in the printf version.
C++ logging in the name of a device
A device implementation is sometimes spread over several classes. Since all these classes implement the same device, their logging requests should be associated with this device name. Unfortunately, the C++ logging macros can’t be used because they are outside the device’s main implementation class. The Tango::LogAdapter class is a workaround for this limitation.
Any method not member of the device’s main implementation class, which send log messages associated to a device must be a member of a class inheriting from the Tango::LogAdapter class. Here is an example:
1 class MyDeviceActualImpl: public Tango::LogAdapter
2 {
3 public :
4 MyDeviceActualImpl(...,Tango::DeviceImpl *device,...)
5 :Tango::LogAdpater(device)
6 {
7 ....
8 //
9 // The following log is associated to the device passed to the constructor
10 //
11 DEBUG_STREAM << "In MyDeviceActualImpl constructor" << endl;
12
13 ....
14 }
15 };
Writing a device server process
Writing a device server can be made easier by adopting the correct approach. This chapter will describe how to write a device server process. It is divided into the following parts : understanding the device, defining device commands/attributes/pipes, choosing device state and writing the necessary classes. All along this chapter, examples will be given using the stepper motor device server. Writing a device server for our stepper motor example device means writing :
The main function
The class_factory method (only for C++ device server)
The StepperMotorClass class
The DevReadPositionCmd and DevReadDirectionCmd classes
The PositionAttr, SetPositionAttr and DirectionAttr classes
The StepperMotor class.
All these functions and classes will be detailed. The stepper motor device server described in this chapter supports 2 commands and 3 attributes which are :
Command DevReadPosition implemented using the inheritance model
Command DevReadDirection implemented using the template command model
Attribute Position (position of the first motor). This attribute is readable and is linked with a writable attribute (called SetPosition). When the value of this attribute is requested by the client, the value of the associated writable attribute is also returned.
Attribute SetPosition (writable attribute linked with the Position attribute). This attribute has some properties with user defined default value.
Attribute Direction (direction of the first motor)
As the reader will understand during the reading of the following sub-chapters, the command and attributes classes (DevReadPositionCmd, DevReadDirectionCmd, PositionAttr, SetPositionAttr and DirectionAttr) are very simple classes. A tool called Pogo has been developped to automatically generate/maintain these classes and to write part of the code needed in the remaining one. See Pogo manual to know more on this Pogo tool.
In order to also gives an example of how the database objects part of the Tango device pattern could be used, our device have two properties. These properties are of the Tango long data types and are named “Max” and “Min”.
Understanding the device
The first step before writing a device server is to develop an understanding of the hardware to be programmed. The Equipment Responsible should have description of the hardware and its operating modes (manuals, spec sheets etc.). The Equipment Responsible must also provide specifications of what the device server should do. The Device Server Programmer should demand an exact description of the registers, alarms, interlocks and any timing constraints which have to be kept. It is very important to have a good understanding of the device interfacing before starting designing a new class.
Once the Device Server Programmer has understood the hardware the next important step is to define what is a logical device i.e. what part of the hardware will be abstracted out and treated as a logical device. In doing so the following points of the TDSOM should be kept in mind
Each device is known and accessed by its ascii name.
The device is exported onto the network to be imported by applications.
Each device belongs to a class.
A list of commands exists per device.
Applications use the device server api to execute commands on a device.
The above points have to be taken into account when designing the level of device abstraction. The definition of what is a device for a certain hardware is primarily the job of the Device Server Programmer and the Applications Programmer but can also involve the Equipment Responsible. The Device Server Programmer should make sure that the Applications Programmer agrees with her definition of what is a device.
Here are some guidelines to follow while defining the level of device abstraction -
efficiency, make sure that not a too fine level of device abstraction has been chosen. If possible group as many attributes together to form a device. Discuss this with the Applications Programmer to find out what is efficient for her application.
hardware independency, one of the main reasons for writing device servers is to provide the Applications Programmer with a software interface as opposed to a hardware interface. Hide the hardware structure of the device. For example if the user is only interested in a single channel of a multichannel device then define each channel to be a logical device. The user should not be aware of hardware addresses or cabling details. The user is very often a scientist who has a physics-oriented world view and not a hardware-oriented world view. Hardware independency also has the advantage that applications are immune to hardware changes to the device
object oriented world view, another raison d’etre behind the device server model is to build up an object oriented view of the world. The device should resemble the user’s view of the object as closely as possible. In the case of the ESRF’s beam lines for example, the devices should resemble beam line scientist’s view of the machine.
atomism, each device can be considered like an atom - is a independent object. It should appear independent to the client even if behind the scenes it shares some hardware or software with other objects. This is often the case with multichannel devices where the user would like to see each channel as a device but it is obvious that the channels cannot be programmed completely independently. The logical device is there to hide or make transparent this fact. If it is impossible to send commands to one device without modifying another device then a single device should be made out the two devices.
tailored vs general, one of the philosophies of the TDSOM is to provide tailored solutions. For example instead of writing one serial line class which treats the general case of a serial line device and leaving the device protocol to be implemented in the client the TDSOM advocates implementing a device class which handles the protocol of the device. This way the client only has to know the commands of the class and not the details of the protocol. Nothing prevents the device class from using a general purpose serial line class if it exists of course.
Defining device commands
Each device has a list of commands which can be executed by the application across the network or locally. These commands are the Application Programmer’s network knobs and dials for interacting with the device.
The list of commands to be implemented depends on the capabilities of the hardware, the list of sensible functions which can be executed at a distance and of course the functionality required by the application. This implies a close collaboration between the Equipment Responsible, Device Server Programmer and the Application Programmer.
When drawing up the list of commands particular attention should be paid to the following points
performance, no single command should monopolize the device server for a long time (a nominal value for long is one second). Commands should be implemented in such a way that it executes immediately returning with a response. At best try to keep command execution time down to less than the typical overhead of an rpc call i.e. som milliseconds. This of course is not always possible e.g. a serial line device could require 100 milliseconds of protocol exchange. The Device Server Programmer should find the best trade-off between the users requirements and the devices capabilities. If a command implies a sequence of events which could last for a long time then implement the sequence of events in another thread - don’t block the device server.
robustness, should be provided which allow the client to recover from error conditions and or do a warm startup.
Standard commands
A minimum set of three commands exist for all devices. These commands are
State which returns the state of a device
Status which returns the status of the device as a formatted ascii string
Init which re-initialize a device without changing its network connection
These commands have already been discussed in [Auto_cmd]
Choosing device state
The device state is a number which reflects the availability of the device. To simplify the coding for generic application, a predefined set of states are supported by TANGO. This list has 14 members which are
State name |
|---|
ON |
OFF |
CLOSE |
OPEN |
INSERT |
EXTRACT |
MOVING |
STANDBY |
FAULT |
INIT |
RUNNING |
ALARM |
DISABLE |
UNKNOWN |
The names used here have obvious meaning.
Device server utilities to ease coding/debugging
The device server framework supports one set of utilities to ease the process of coding and debugging device server code. This utility is :
The device server verbose option
Using this facility avoids the usage of the classical “#ifdef DEBUG” style which makes code less readable.
The device server verbose option
Each device server supports a verbose option called -v. Four verbose levels are defined from 1 to 4. Level 4 is the most talkative one. If you use the -v option without specifying level, level 4 will be assumed.
Since Tango release 3, a Tango Logging Service has been introduced (detailed in chapter [The-Tango-Logging chapter]). This -v option set-up the logging service. If it used, it will automatically add a console target to all devices embedded within the device server process. Level 1 and 2 will set the logging level to all devices embedded within the device server to INFO. Level 3 and 4 will set the logging level to all devices embedded within the device server to DEBUG. All messages sent by the API layer are associated to the administration device.
C++ utilities to ease device server coding
Some utilities functions have been added in the C++ release to ease Tango device server development. These utilities allow the user to
Init a C++ vector from a data of one of the Tango DevVarXXXArray data types
Init a data of one of the Tango::DevVarxxxArray data type from a C++ vector
Print a data of one of Tango::DevVarxxxArray data type
They mainly used the “<<” operator overloading features. The following code lines are an example of usage of these utilities.
1 vector<string> v1;
2 v1.push_back("one");
3 v1.push_back("two");
4 v1.push_back("three");
5
6 Tango::DevVarStringArray s;
7 s << v1;
8 cout << s << endl;
9
10 vector<string> v2;
11 v2 << s;
12
13 for (int i = 0;i < v2.size();i++)
14 cout << "vector element = " << v2[i] << endl;
Line 1-4 : Create and Init a C++ string vector
Line 7 : Init a Tango::DevVarStringArray data from the C++ vector
Line 8 : Print all the Tango::DevVarStringArray element in one line of code.
Line 11 : Init a second empty C++ string vector with the content of the Tango::DevVarStringArray
Avoiding name conflicts
Namespace are used to avoid name conflicts. Each device pattern implementation is defined within its own namespace. The name of the namespace is the device pattern class name. In our example, the namespace name is StepperMotor.
The device server main function
A device server main function (or method) always follows the same framework. It exactly implements all the action described in chapter [Server_startup]. Even if it could be always the same, it has not been included in the library because some linkers are perturbed by the presence of two main functions.
1 #include <tango.h>
2
3 int main(int argc,char *argv[])
4 {
5
6 Tango::Util *tg;
7
8 try
9 {
10
11 tg = Tango::Util::init(argc,argv);
12
13 tg->server_init();
14
15 cout << "Ready to accept request" << endl;
16 tg->server_run();
17 }
18 catch (bad_alloc)
19 {
20 cout << "Can't allocate memory!!!" << endl;
21 cout << "Exiting" << endl;
22 }
23 catch (CORBA::Exception &e)
24 {
25 Tango::Except::print_exception(e);
26
27 cout << "Received a CORBA::Exception" << endl;
28 cout << "Exiting" << endl;
29 }
30
31 tg->server_cleanup();
32
33 return(0);
34 }
Line 1 : Include the tango.h file. This file is a master include file. It includes several other files. The list of files included by tango.h can be found in [TangoRefMan]
Line 11 : Create the instance of the Tango::Util class (a singleton). Passing argc,argv to this method is mandatory because the device server command line is checked when the Tango::Util object is constructed.
Line 13 : Start all the device pattern creation and initialization with the server_init() method
Line 16 : Put the server in a endless waiting loop with the server_run() method. In normal case, the process should never returns from this line.
Line 18-22 : Catch all exceptions due to memory allocation error, display a message to the user and exit
Line 23 : Catch all standard TANGO exception which could occur during device pattern creation and initialization
Line 25 : Print exception parameters
Line 27-28 : Print an additional message
Line 31 : Cleanup the server before exiting by calling the server_cleanup() method.
The DServer::class_factory method
As described in chapter [DServer_class], C++ device server needs a class_factory() method. This method creates all the device pattern implemented in the device server by calling their init() method. The following is an example of a class_factory method for a device server with one implementation of the device server pattern for stepper motor device.
1 #include <tango.h>
2 #include <steppermotorclass.h>
3
4 void Tango::DServer::class_factory()
5 {
6
7 add_class(StepperMotor::StepperMotorClass::init("StepperMotor"));
8
9 }
Line 1 : Include the Tango master include file
Line 2 : Include the steppermotorclass class definition file
Line 7 : Create the StepperMotorClass singleton by calling its init method and stores the returned pointer into the DServer object. Remember that all classes for the device pattern implementation for the stepper motor class is defined within a namespace called StepperMotor.
Writing the StepperMotorClass class
The class declaration file
1 #include <tango.h>
2
3 namespace StepperMotor
4 {
5
6 class StepperMotorClass : public Tango::DeviceClass
7 {
8 public:
9 static StepperMotorClass *init(const char *);
10 static StepperMotorClass *instance();
11 ~StepperMotorClass() {_instance = NULL;}
12
13 protected:
14 StepperMotorClass(string &);
15 static StepperMotorClass *_instance;
16 void command_factory();
17 void attribute_factory(vector<Tango::Attr *> &);
18
19 public:
20 void device_factory(const Tango::DevVarStringArray *);
21 };
22
23 } /* End of StepperMotor namespace */
Line 1 : Include the Tango master include file
Line 3 : This class is defined within the StepperMotor namespace
Line 6 : Class StepperMotorClass inherits from Tango::DeviceClass
Line 9-10 : Definition of the init and instance methods. These methods are static and can be called even if the object is not already constructed.
Line 11: The destructor
Line 14 : The class constructor. It is protected and can’t be called from outside the class. Only the init method allows a user to create an instance of this class. See [Patterns] to get details about the singleton design pattern.
Line 15 : The instance pointer. It is static in order to set it to NULL during process initialization phase
Line 16 : Definition of the command_factory method
Line 17 : Definition of the attribute_factory method
Line 20 : Definition of the device_factory method
The command_factory method
Within our example, the stepper motor device supports two commands which are called DevReadPosition and DevReadDirection. These two command takes a Tango::DevLong argument as input and output parameter. The first command is created using the inheritance model and the second command is created using the template command model.
1 void StepperMotorClass::command_factory()
2 {
3 command_list.push_back(new DevReadPositionCmd("DevReadPosition",
4 Tango::DEV_LONG,
5 Tango::DEV_LONG,
6 "Motor number (0-7)",
7 "Motor position"));
8
9 command_list.push_back(
10 new TemplCommandInOut<Tango::DevLong,Tango::DevLong>
11 ((const char *)"DevReadDirection",
12 static_cast<Tango::Lg_CmdMethPtr_Lg>
13 (&StepperMotor::dev_read_direction),
14 static_cast<Tango::StateMethPtr>
15 (&StepperMotor::direct_cmd_allowed))
16 );
17 }
Line 4 : Creation of one instance of the DevReadPositionCmd class. The class is created with five arguments which are the command name, the command type code for its input and output parameters and two strings which are the command input and output parameters description. The pointer returned by the new C++ keyword is added to the vector of available command.
Line 10-14 : Creation of the object used for the DevReadDirection command. This command has one input and output parameter. Therefore the created object is an instance of the TemplCommandInOut class. This class is a C++ template class. The first template parameter is the command input parameter type, the second template parameter is the command output parameter type. The second TemplCommandInOut class constructor parameter (set at line 13) is a pointer to the method to be executed when the command is requested. A casting is necessary to store this pointer as a pointer to a method of the DeviceImpl class 3. The third TemplCommandInOut class constructor parameter (set at line 15) is a pointer to the method to be executed to check if the command is allowed. This is necessary only if the default behavior (command always allowed) does not fulfill the needs. A casting is necessary to store this pointer as a pointer to a method of the DeviceImpl class. When a command is created using the template command method, the input and output parameters type are determined from the template C++ class parameters.
The device_factory method
The device_factory method has one input parameter. It is a pointer to Tango::DevVarStringArray data which is the device name list for this class and the instance of the device server process. This list is fetch from the Tango database.
1 void StepperMotorClass::device_factory(const Tango::_DevVarStringArray *devlist_ptr)
2 {
3
4 for (long i = 0;i < devlist_ptr->length();i++)
5 {
6 DEBUG_STREAM << "Device name : " << (*devlist_ptr)[i] << endl;
7
8 device_list.push_back(new StepperMotor(this,(*devlist_ptr)[i])); 9
9 if (Tango::Util::_UseDb == true)
10 export_device(device_list.back());
11 else
12 export_device(device_list.back(),(*devlist_ptr[i]));
13 }
14 }
Line 4 : A loop for each device
Line 8 : Create the device object using a StepperMotor class constructor which needs two arguments. These two arguments are a pointer to the StepperMotorClass instance and the device name. The pointer to the constructed object is then added to the device list vector
Line 10-13 : Export device to the outside world using the export_device method of the DeviceClass class.
The attribute_factory method
The rule of this method is to fulfill a vector of pointer to attributes. A reference to this vector is passed as argument to this method.
1 void StepperMotorClass::attribute_factory(vector<Tango::Attr *> &att_list)
2 {
3 att_list.push_back(new PositionAttr());
4
5 Tango::UserDefaultAttrProp def_prop;
6 def_prop.set_label("Set the motor position");
7 def_prop.set_format("scientific;setprecision(4)");
8 Tango::Attr *at = new SetPositionAttr();
9 at->set_default_properties(def_prop);
10 att_list.push_back(at);
11
12 att_list.push_back(new DirectcionAttr());
13 }
Line 3 : Create the PositionAttr class and store the pointer to this object into the attribute pointer vector.
Line 5-7 : Create a Tango::UserDefaultAttrProp instance and set the label and format properties default values in this object
Line 8 : Create the SetPositionAttr attribute.
Line 9 : Set attribute user default value with the set_default_properties() method of the Tango::Attr class.
Line 10 : Store the pointer to this object into the attribute pointer vector.
Line 12 : Create the DirectionAttr class and store the pointer to this object into the attribute pointer vector.
Please, note that in some rare case, it is necessary to add attribute to this list during the device server life cycle. This attribute_factory() method is called once during device server start-up. A method add_attribute() of the DeviceImpl class allows the user to add a new attribute to the attribute list outside of this attribute_factory() method. See [TangoRefMan] for more information on this method.
The DevReadPositionCmd class
The class declaration file
1 #include <tango.h>
2
3 namespace StepperMotor
4 {
5
6 class DevReadPositionCmd : public Tango::Command
7 {
8 public:
9 DevReadPositionCmd(const char *,Tango::CmdArgType,
10 Tango::CmdArgType,
11 const char *,const char *);
12 ~DevReadPositionCmd() {};
13
14 virtual bool is_allowed (Tango::DeviceImpl *, const CORBA::Any &);
15 virtual CORBA::Any *execute (Tango::DeviceImpl *, const CORBA::Any &);
16 };
17
18 } /* End of StepperMotor namespace */
Line 1 : Include the tango master include file
Line 3 : Open the StepperMotor namespace.
Line 6 : The DevReadPositionCmd class inherits from the Tango::Command class
Line 9 : The constructor
Line 12 : The destructor
Line 14 : The definition of the is_allowed method. This method is not necessary if the default behavior implemented by the default is_allowed method fulfill the requirements. The default behavior is to always allows the command execution (always return true).
Line 15: The definition of the execute method
The class constructor
The class constructor does nothing. It simply invoke the Command constructor by passing it its five arguments which are:
The command name
The command input type code
The command output type code
The command input parameter description
The command output parameter description
With this 5 parameters command class constructor, the command display level is not specified. Therefore it is set to its default value (OPERATOR). If the command does not have input or output parameter, it is not possible to use the Command class constructor defined with five parameters. In this case, the command constructor execute the Command class constructor with three elements (class name, input type, output type) and set the input or output parameter description fields with the set_in_type_desc or set_out_type_desc Command class methods. To set the command display level, it is possible to use a 6 parameters constructor or it is also possible to set it in the constructor code with the set_disp_level method. Many Command class constructors are defined. See [TangoRefMan] for a complete list.
The is_allowed method
In our example, the DevReadPosition command is allowed only if the device is in the ON state. This method receives two argument which are a pointer to the device object on which the command must be executed and a reference to the command input Any object. This method returns a boolean which must be set to true if the command is allowed. If this boolean is set to false, the DeviceClass command_handler method will automatically send an exception to the caller.
1 bool DevReadPositionCmd::is_allowed(Tango::DeviceImpl *device,
2 const CORBA::Any &in_any)
3 {
4 if (device->get_state() == Tango::ON)
5 return true;
6 else
7 return false;
8 }
Line 4 : Call the get_state method of the DeviceImpl class which simply returns the device state
Line 5 : Authorize command if the device state is ON
Line 7 : Refuse command execution in all other cases.
The execute method
This method receives two arguments which are a pointer to the device object on which the command must be executed and a reference to the command input Any object. This method returns a pointer to an any object which must be initialized with the data to be returned to the caller.
1 CORBA::Any *DevReadPositionCmd::execute(
2 Tango::DeviceImpl *device,
3 const CORBA::Any &in_any)
4 {
5 INFO_STREAM << "DevReadPositionCmd::execute(): arrived" << endl;
6 Tango::DevLong motor;
7
8 extract(in_any,motor);
9 return insert(
10 (static_cast<StepperMotor *>(device))->dev_read_position(motor));
11 }
Line 8 : Extract incoming data from the input any object using a Command class extract helper method. If the type of the data in the Any object is not a Tango::DevLong, the extract method will throw an exception to the client.
Line 9 : Call the stepper motor object method which execute the DevReadPosition command and insert the returned value into an allocated Any object. The Any object allocation is done by the insert method which return a pointer to this Any.
The PositionAttr class
The class declaration file
1 #include <tango.h>
2 #include <steppermotor.h>
3
4 namespace StepperMotor
5 {
6
7
8 class PositionAttr: public Tango::Attr
9 {
10 public:
11 PositionAttr():Attr("Position",
12 Tango::DEV_LONG,
13 Tango::READ_WITH_WRITE,
14 "SetPosition") {};
15 ~PositionAttr() {};
16
17 virtual void read(Tango::DeviceImpl *dev,Tango::Attribute &att)
18 {(static_cast<StepperMotor *>(dev))->read_Position(att);}
19 virtual bool is_allowed(Tango::DeviceImpl *dev,Tango::AttReqType ty)
20 {return (static_cast<StepperMotor *>(dev))->is_Position_allowed(ty);}
21 };
22
23 } /* End of StepperMotor namespace */
24
25 #endif // _STEPPERMOTORCLASS_H
Line 1-2 : Include the tango master include file and the steppermotor class definition include file
Line 4 : Open the StepperMotor namespace.
Line 8 : The PosiitionAttr class inherits from the Tango::Attr class
Line 11-14 : The constructor with 4 arguments
Line 15 : The destructor
Line 17 : The definition of the read method. This method forwards the call to a StepperMotor class method called read_Position()
Line 19 : The definition of the is_allowed method. This method is not necessary if the default behaviour implemented by the default is_allowed method fulfills the requirements. The default behaviour is to always allows the attribute reading (always return true). This method forwards the call to a StepperMotor class method called is_Position_allowed()
The class constructor
The class constructor does nothing. It simply invoke the Attr constructor by passing it its four arguments which are:
The attribute name
The attribute data type code
The attribute writable type code
The name of the associated write attribute
With this 4 parameters Attr class constructor, the attribute display level is not specified. Therefore it is set to its default value (OPERATOR). To set the attribute display level, it is possible to use in the constructor code the set_disp_level method. Many Attr class constructors are defined. See [TangoRefMan] for a complete list.
This Position attribute is a scalar attribute. For spectrum attribute, instead of inheriting from the Attr class, the class must inherits from the SpectrumAttr class. Many SpectrumAttr class constructors are defined. See [TangoRefMan] for a complete list.
For Image attribute, instead of inheriting from the Attr class, the class must inherits from the ImageAttr class. Many ImageAttr class constructors are defined. See [TangoRefMan] for a complete list.
The is_allowed method
This method receives two argument which are a pointer to the device object to which the attribute belongs to and the type of request (read or write). In the PositionAttr class, this method simply forwards the request to a method of the StepperMotor class called is_Position_allowed() passing the request type to this method. This method returns a boolean which must be set to true if the attribute is allowed. If this boolean is set to false, the DeviceImpl read_attribute method will automatically send an exception to the caller.
The read method
This method receives two arguments which are a pointer to the device object to which the attribute belongs to and a reference to the corresponding attribute object. This method forwards the request to a StepperMotor class called read_Position() passing it the reference on the attribute object.
The StepperMotor class
The class declaration file
1 #include <tango.h>
2
3 #define AGSM_MAX_MOTORS 8 // maximum number of motors per device
4
5 namespace StepperMotor
6 {
7
8 class StepperMotor: public TANGO_BASE_CLASS
9 {
10 public :
11 StepperMotor(Tango::DeviceClass *,string &);
12 StepperMotor(Tango::DeviceClass *,const char *);
13 StepperMotor(Tango::DeviceClass *,const char *,const char *);
14 ~StepperMotor() {};
15
16 DevLong dev_read_position(DevLong);
17 DevLong dev_read_direction(DevLong);
18 bool direct_cmd_allowed(const CORBA::Any &);
19
20 virtual Tango::DevState dev_state();
21 virtual Tango::ConstDevString dev_status();
22
23 virtual void always_executed_hook();
24
25 virtual void read_attr_hardware(vector<long> &attr_list);
26 virtual void write_attr_hardware(vector<long> &attr_list);
27
28 void read_position(Tango::Attribute &);
29 bool is_Position_allowed(Tango::AttReqType req);
30 void write_SetPosition(Tango::WAttribute &);
31 void read_Direction(Tango::Attribute &);
32
33 virtual void init_device();
34 virtual void delete_device();
35
36 void get_device_properties();
37
38 protected :
39 long axis[AGSM_MAX_MOTORS];
40 DevLong position[AGSM_MAX_MOTORS];
41 DevLong direction[AGSM_MAX_MOTORS];
42 long state[AGSM_MAX_MOTORS];
43
44 Tango::DevLong *attr_Position_read;
45 Tango::DevLong *attr_Direction_read;
46 Tango::DevLong attr_SetPosition_write;
47
48 Tango::DevLong min;
49 Tango::DevLong max;
50
51 Tango::DevLong *ptr;
52 };
53
54 } /* End of StepperMotor namespace */
Line 1 : Include the Tango master include file
Line 5 : Open the StepperMotor namespace.
Line 8 : The StepperMotor class inherits from a Tango base class
Line 11-13 : Three different object constructors
Line 14 : The destructor which calls the delete_device() method
Line 16 : The method to be called for the execution of the DevReadPosition command. This method must be declared as virtual if it is needed to redefine it in a class inheriting from StepperMotor. See chapter [Inheriting] for more details about inheriting.
Line 17 : The method to be called for the execution of the DevReadDirection command
Line 18 : The method called to check if the execution of the DevReadDirection command is allowed. This method is necessary because the DevReadDirection command is created using the template command method and the default behavior is not acceptable
Line 20 : Redefinition of the dev_state. This method is used by the State command
Line 21 : Redefinition of the dev_status. This method is used by the Status command
Line 23 : Redefinition of the always_executed_hook method. This method is the place to code mandatory action which must be executed prior to any command.
Line 25-31 : Attribute related methods
Line 32 : Definition of the init_device method.
Line 33 : Definition of the delete_device method
Line 35 : Definition of the get_device_properties method
Line 38-50 : Data members.
Line 43-44 : Pointers to data for readable attributes Position and Direction
Line 45 : Data for the SetPosition attribute
Line 47-48 : Data members for the two device properties
The constructors
Three constructors are defined here. It is not mandatory to defined three constructors. But at least one is mandatory. The three constructors take a pointer to the StepperMotorClass instance as first parameter 4. The second parameter is the device name as a C++ string or as a classical pointer to char array. The third parameter necessary only for the third form of constructor is the device description string passed as a classical pointer to a char array.
1 #include <tango.h>
2 #include <steppermotor.h>
3
4 namespace StepperMotor
5 {
6
7 StepperMotor::StepperMotor(Tango::DeviceClass *cl,string &s)
8 :TANGO_BASE_CLASS(cl,s.c_str())
9 {
10 init_device();
11 }
12
13 StepperMotor::StepperMotor(Tango::DeviceClass *cl,const char *s)
14 :TANGO_BASE_CLASS(cl,s)
15 {
16 init_device();
17 }
18
19 StepperMotor::StepperMotor(Tango::DeviceClass *cl,const char *s,const char *d)
20 :TANGO_BASE_CLASS(cl,s,d)
21 {
22 init_device();
23 }
24
25 void StepperMotor::init_device()
26 {
27 cout << "StepperMotor::StepperMotor() create " << device_name << endl;
28
29 long i;
30
31 for (i=0; i< AGSM_MAX_MOTORS; i++)
32 {
33 axis[i] = 0;
34 position[i] = 0;
35 direction[i] = 0;
36 }
37
38 ptr = new Tango::DevLong[10];
39
40 get_device_properties();
41 }
42
43 void StepperMotor::delete_device()
44 {
45 delete [] ptr;
46 }
Line 1-2 : Include the Tango master include file (tango.h) and the StepperMotor class definition file (steppermotor.h)
Line 4 : Open the StepperMotor namespace
Line 7-11 : The first form of the class constructor. It execute the Tango base class constructor with the two parameters. Note that the device name passed to this constructor as a C++ string is passed to the Tango::DeviceImpl constructor as a classical C string. Then the init_device method is executed.
Line 13-17 : The second form of the class constructor. It execute the Tango base class constructor with its two parameters. Then the init_device method is executed.
Line 19-23: The third form of constructor. Again, it execute the Tango base class constructor with its three parameters. Then the init_device method is executed.
Line 25-41 : The init_device method. All the device data initialization is done in this method. The device properties are also retrieved from database with a call to the get_device_properties method at line 40. The device data member called ptr is initialized with allocated memory at line 38. It is not needed to have this pointer, it has been added only for educational purpose.
Line 43-46 : The delete_device method. The rule of this method is to free memory allocated in the init_device method. In our case , only the device data member ptr is allocated in the init_device method. Therefore, its memory is freed at line 45. This method is called by the automatically added Init command before it calls the init_device method. It is also called by the device destructor.
The methods used for the DevReadDirection command
The DevReadDirection command is created using the template command method. Therefore, there is no specific class needed for this command but only one object of the TemplCommandInOut class. This command needs two methods which are the dev_read_direction method and the direct_cmd_allowed method. The direct_cmd_allowed method defines here implements exactly the same behavior than the default one. This method has been used only for pedagogic issue. The dev_read_direction method will be executed by the execute method of the TemplCommandInOut class. The direct_cmd_allowed method will be executed by the is_allowed method of the TemplCommandInOut class.
1 DevLong StepperMotor::dev_read_direction(DevLong axis)
2 {
3 if (axis < 0 || axis > AGSM_MAX_MOTORS)
4 {
5 WARNING_STREAM << "Steppermotor::dev_read_direction(): axis out of range !";
6 WARNING_STREAM << endl;
7 TangoSys_OMemStream o;
8
9 o << "Axis number " << axis << " out of range" << ends;
10 throw_exception("StepperMotor_OutOfRange",
11 o.str(),
12 "StepperMotor::dev_read_direction");
13 }
14
15 return direction[axis];
16 }
17
18
19 bool StepperMotor::direct_cmd_allowed(const CORBA::Any &in_data)
20 {
21 INFO_STREAM << "In direct_cmd_allowed() method" << endl;
22
23 return true;
24 }
Line 1-16 : The dev_read_direction method
Line 5-12 : Throw exception to client if the received axis number is out of range
Line 7 : A TangoSys_OMemStream is used as stream. The TangoSys_OMemStream has been defined in improve portability across platform. For Unix like operating system, it is a ostrtream type. For operating system with a full implementation of the standard library, it is a ostringstream type.
Line 19-24 : The direct_cmd_allowed method. The command input data is passed to this method in case of it is needed to take the decision. This data is still packed into the CORBA Any object.
The methods used for the Position attribute
1 void StepperMotor::read_attr_hardware(vector<long> &attr_list)
2 {
3 INFO_STREAM << "In read_attr_hardware for " << attr_list.size();
4 INFO_STREAM << " attribute(s)" << endl;
5
6 for (long i = 0;i < attr_list.size();i++)
7 {
8 string attr_name;
9 attr_name = dev_attr->get_attr_by_ind(attr_list[i]).get_name();
10
11 if (attr_name == "Position")
12 {
13 attr_Position_read = &(position[0]);
14 }
15 else if (attr_name == "Direction")
16 {
17 attr_Direction_read = &(direction[0]);
18 }
19 }
20 }
21
22 void read_Position(Tango::Attribute &att)
23 {
24 att.set_value(attr_Position_read);
25 }
26
27 bool is_Position_allowed(Tango::AttReqType req)
28 {
29 if (req == Tango::WRITE_REQ)
30 return false;
31 else
32 {
33 if (get_state() == Tango::ON)
34 return true;
35 else
36 return false;
37 }
38 }
Line 6 : A loop on each attribute to be read
Line 9 : Get attribute name
Line 11 : Test on attribute name
Line 13 : Read hardware (pretty simple in our case)
Line 24 : Set attribute value in Attribute object using the set_value() method. This method will also initializes the attribute quality factor to Tango::ATTR_VALID if no alarm level are defined and will set the attribute returned date. It is also possible to use a method called set_value_date_quality() which allows the user to set the attribute quality factor as well as the attribute date.
Line 33 : Test on device state
The methods used for the SetPosition attribute
To enable writing of attributes, the StepperMotor class must re-define one or two methods called write_<Attribute_name>() and if necessary a method called is_<Attribute_name>_allowed(). The aim of the first one is to write the hardware. The write_Position() method receives a reference to the WAttribute object. The value to write is in this WAttribute object. The third method (is_Position_allowed()) aim is to allow or dis-allow, the attribute writing. In some cases, some attributes can be write only if some conditions are met. If this method returns true, the write_<Attribute_name>() method will be called. Otherwise, an error will be generated for the attribute. This method receives one argument which is an emumeration describing the attribute request type (read or write). For read/write attribute, this method is the same for reading and writing. The input argument value makes the difference.
For our example, it is always possible to write the SetPosition attribute. Therefore, the StepperMotor class only defines a write_SetPosition() method.
1 void StepperMotor::write_SetPosition(Tango::WAttribute &att)
2 {
3 att.get_write_value(sttr_SetPosition_write);
4
5 DEBUG_STREAM << "Attribute SetPosition value = ";
6 DEBUG_STREAM << attr_SetPosition_write << endl;
7
8 position[0] = attr_SetPosition_write;
9 }
10
11 void StepperMotor::write_attr_hardware(vector<long> &attr_list)
12 {
13
14 }
Line 3 : Retrieve new attribute value
Line 5-6 : Send some messages using Tango Logging system
Line 8 : Set the hardware (pretty simple in our case)
Retrieving device properties
Retrieving properties is fairly simple with the use of the database object. Each Tango device is an aggregate with a DbDevice object (see figure [Device pattern figure]). This has been grouped in a method called get_device_properties(). The classes and methods of the Dbxxx objects are described in the Tango API documentation.
1 void DocDs::get_device_property()
2 {
3 Tango::DbData data;
4 data.push_back(DbDatum("Max"));
5 data.push_back(DbDatum("Min"));
6
7 get_db_device()->get_property(data);
8
9 if (data[0].is_empty()==false)
10 data[0] >> max;
11 if (data[1].is_empty()==false)
12 data[1] >> min;
13 }
Line 4-5 : Two DbDatum (one per property) are stored into a DbData object
Line 7 : Call the database to retrieve properties value
Line 9-10 : If the Max property is defined in the database, extract its value from the DbDatum object and store it in a device data member
Line 11-12 : If the Min property is defined in the database, extract its value from the DbDatum object and store it in a device data member
The remaining methods
The remaining methods are the dev_state, dev_status, always_executed_hook, dev_read_position and read_Direction() methods. The dev_state method parameters are fixed. It does not receive any input parameter and must return a Tango_DevState data type. The dev_status parameters are also fixed. It does not receive any input parameter and must return a Tango string. The always_executed_hook receives nothing and return nothing. The dev_read_position method input parameter is the motor number as a long and the returned parameter is the motor position also as a long data type. The read_Direction() method is the method for reading the Direction attribute.
1 DevLong StepperMotor::dev_read_position(DevLong axis)
2 {
3
4 if (axis < 0 || axis > AGSM_MAX_MOTORS)
5 {
6 WARNING_STREAM << "Steppermotor::dev_read_position(): axis out of range !";
7 WARNING_STREAM << endl;
8
9 TangoSys_OMemStream o;
10
11 o << "Axis number " << axis << " out of range" << ends;
12 throw_exception("StepperMotor_OutOfRange",
13 o.str(),
14 "StepperMotor::dev_read_position");
15 }
16
17 return position[axis];
18 }
19
20 void always_executed_hook()
21 {
22 INFO_STREAM << "In the always_executed_hook method << endl;
23 }
24
25 Tango_DevState StepperMotor::dev_state()
26 {
27 INFO_STREAM << "In StepperMotor state command" << endl;
28 return DeviceImpl::dev_state();
29 }
30
31 Tango_DevString StepperMotor::dev_status()
32 {
33 INFO_STREAM << "In StepperMotor status command" << endl;
34 return DeviceImpl::dev_status();
35 }
36
37 void read_Direction(Tango::Attribute att)
38 {
39 att.set_value(attr_Direction_read);
40 }
Line 1-18 : The dev_read_position method
Line 6-14 : Throw exception to client if the received axis number is out of range
Line 9 : A TangoSys_OMemStream is used as stream. The TangoSys_OMemStream has been defined in improve portability across platform. For Unix like operating system, it is a ostrtream type. For operating system with a full implementation of the standard library, it is a ostringstream type.
Line 20-23 : The always_executed_hook method. It does nothing. It has been included here only as pedagogic usage.
Line 25-29 : The dev_state method. It does exactly what the default dev_state does. It has been included here only as pedagogic usage
Line 31-35 : The dev_status method. It does exactly what the default dev_status does. It has been included here only as pedagogic usage
Line 37-40 : The read_Direction method. Simply set the Attribute object internal value
Device server under Windows
Two kind of programs are available under Windows. These kinds of programs are called console application or Windows application. A console application is started from a MS-DOS window and is very similar to classical UNIX program. A Windows application is most of the time not started from a MS-DOS window and is generally a graphical application without standard input/output. Writing a device server in a console application is straight forward following the rules described in the previous sub-chapters. Writing a device server in a Windows application needs some changes detailed in the following sub-chapters.
The Tango device server graphical interface
Within the Windows operating system, most of the running application has a window user interface. This is also true for the Windows Tango device server. Using or not this interface is up to the device server programmer. The choice is done with an argument to the server_init() method of the Tango::Util class. This interface is pretty simple and is based on three windows which are :
The device server main window
The device server console window
The device server help window
The device server main window
This window looks like :
Figure 6.7: Tango device server main window
Four menus are available in this window. The File menu allows the user to exit the device server. The View menu allows you to display/hide the device server console window. The Debug menu allows the user to change the server output verbose level. All the outputs goes to the console window even if it is hidden. The Help menu displays the help window. The device server name is displayed in the window title. The text displayed at the bottom of the window has a default value (the one displayed in this window dump) but may be changed by the device server programmer using the set_main_window_text() method of the Tango::Util class. If used, this method must be called prior to the call of the server_init() method. Refer to [TangoRefMan] for a complete description of this method.
The console window
This window looks like :
It simply displays all the logging** message when a console target is used in the device server.
The help window
This window looks like :
This window displays
The device server name
The Tango library release
The Tango IDL definition release
The device server release. The device server programmer may set this release number using the set_server_version() method of the Tango::Util class. If used, this must be done prior to the call of the server_init() method. If the set_server_version() method is not used, x.y is displays as version number. Refer to [TangoRefMan] for a complete description of this method.
MFC device server
There is no main function within a classical MFC program. Most of the time, your application is represented by one instance of a C++ class which inherits from the MFC CWinApp class. This CWinApp class has several methods that you may overload in your application class. For a device server to run correctly, you must overload two methods of the CWinApp class. These methods are the InitInstance() and ExitInstance() methods. The rule of these methods is obvious following their names.
Remember that if the Tango device server graphical user interface is used, you must link your device server with the Tango windows resource file. This is done by adding the Tango resource file to the Project Settings/Link/Input/Object, library modules window in VC++.
The InitInstance method
The code to be added here is the equivalent of the code written in a classical main() function. Don’t forget to add the tango.h file in the list of included files.
1 BOOL FluidsApp::InitInstance()
2 {
3 AfxEnableControlContainer();
4
5 // Standard initialization
6 // If you are not using these features and wish to reduce the size
7 // of your final executable, you should remove from the following
8 // the specific initialization routines you do not need.
9
10 #ifdef _AFXDLL
11 Enable3dControls(); // Call this when using MFC in a shared DLL
12 #else
13 Enable3dControlsStatic(); // Call this when linking to MFC statically
14 #endif
15 Tango::Util *tg;
16 try
17 {
18
19 tg = Tango::Util::init(m_hInstance,m_nCmdShow);
20
21 tg->server_init(true);
22
23 tg->server_run();
24
25 }
26 catch (bad_alloc)
27 {
28 MessageBox((HWND)NULL,"Memory error","Command line",MB_ICONSTOP);
29 return(FALSE);
30 }
31 catch (Tango::DevFailed &e)
32 {
33 MessageBox((HWND)NULL,,e.errors[0].desc.in(),"Command line",MB_ICONSTOP);
34 return(FALSE);
35 }
36 catch (CORBA::Exception &)
37 {
38 MessageBox((HWND)NULL,"Exception CORBA","Command line",MB_ICONSTOP);
39 return(FALSE);
40 }
41
42 m_pMainWnd = new CWnd;
43 m_pMainWnd->Attach(tg->get_ds_main_window());
44
45 return TRUE;
46 }
Line 19 : Initialise Tango system. This method also analises the argument used in command line.
Line 21 : Create Tango classes requesting the Tango Windows graphical interface to be used
Line 23 : Start Network listener. Note that under NT, this call returns in the contrary of UNIX like operating system.
Line 26-30 : Display a message box in case of memory allocation error and leave method with a return value set to false in order to stop the process
Line 31-35 : Display a message box in case of error during server initialization phase.
Line 36-40 : Display a message box in case of error other than memory allocation. Leave method with a return value set to false in order to stop the process.
Line 37-38 : Create a MFC main window and attach the Tango graphical interface main window to this MFC window.
The ExitInstance method
This method is called when the application is stopped. For Tango device server, its rule is to destroy the Tango::Util singleton if this one has been correctly constructed.
1 int FluidsApp::ExitInstance()
2 {
3 bool del = true;
4
5 try
6 {
7 Tango::Util *tg = Tango::Util::instance();
8 }
9 catch(Tango::DevFailed)
10 {
11 del = false;
12 }
13
14 if (del == true)
15 delete (Tango::Util::instance());
16
17 return CWinApp::ExitInstance();
18 }
Line 7 : Try to retrieve the Tango::Util singleton. If this one has not been constructed correctly, this call will throw an exception.
Line 9-12 : Catch the exception in case of incomplete Tango::Util singleton construction
Line 14-15 : Delete the Tango::Util singleton. This will unregister the Tango device server from the Tango database.
Line 17 : Execute the ExitInstance method of the CWinApp class.
If you don’t want to use the Tango device server graphical interface, do not pass any parameter to the server_init() method and instead of the code display in lines 37 and 38 in the previous example of the InitInstance() method, use your own code to initialize your own application.
Example of how to build a Windows device server MFC based
This sub-chapter gives an example of what it is needed to do to build a MFC Windows device server. Rather than being a list of actions to strictly follow, this is some general rules of how using VC++ to build a Tango device server using MFC.
Create your device server using Pogo. For a class named MyMotor, the following files will be needed : class_factory.cpp, MyMotorClass.h, MyMotorClass.cpp, MyMotor.h and MyMotor.cpp.
On a Windows computer running VC++, create a new project of type “MFC app Wizard (exe)” using static MFC libs. Ask for a dialog based project without ActiveX controls.
Copy the five files generated by Pogo to the Windows computer and add them to your project
Remove the dialog window files (xxxDlg.cpp and xxxDlg.h), the Resource include file and the resource script file from your project
Add #include <stdafx.h> as first line of the include files list in class_factory.cpp, MyMotorClass.cpp and MyMotor.cpp file. Also add your own directory and the Tango include directory to the project pre-compiler include directories list.
Enable RTTI in your project settings (see chapter [Compiling NT])
Change your application class:
Add the definition of an ExitInstance method in the declaration file. (xxx.h file)
Remove the include of the dialog window file in the xxx.cpp file and add an include of the Tango master include files (tango.h)
Replace the InitInstance() method as described in previous sub-chapter. (xx.cpp file)
Add an ExitInstance() method as described in previous sub-chapter (xxx.cpp file)
Add all the libraries needed to compile a Tango device server (see chapter [Compiling NT]) and the Tango resource file to the linker Object/Libraries modules.
Win32 application
Even if it is more natural to use the C++ structure of the MFC class to write a Tango device server, it is possible to write a device server as a Win32 application. Instead of having a main() function as the application entry point, the operating system, provides a WinMain() function as the application entry point. Some code must be added to this WinMain function in order to support Tango device server. Don’t forget to add the tango.h file in the list of included files. If you are using the project files generated by Pogo, don’t forget to change the linker SUBSYSTEM option to Windows (Under Linker/System in the project properties window).
1 int APIENTRY WinMain(HINSTANCE hInstance,
2 HINSTANCE hPrevInstance,
3 LPSTR lpCmdLine,
4 int nCmdShow)
5 {
6 MSG msg;
7 Tango::Util *tg;
8
9 try
10 {
11 tg = Tango::Util::init(hInstance,nCmdShow);
12
13 string txt;
14 txt = "Blabla first line\n";
15 txt = txt + "Blabla second line\n";
16 txt = txt + "Blabla third line\n";
17 tg->set_main_window_text(txt);
18 tg->set_server_version("2.2");
19
20 tg->server_init(true);
21
22 tg->server_run();
23
24 }
25 catch (bad_alloc)
26 {
27 MessageBox((HWND)NULL,"Memory error","Command line",MB_ICONSTOP);
28 return (FALSE);
29 }
30 catch (Tango::DevFailed &e)
31 {
32 MessageBox((HWND)NULL,e.errors[0].desc.in(),"Command line",MB_ICONSTOP);
33 return (FALSE);
34 }
35 catch (CORBA::Exception &)
36 {
37 MessageBox((HWND)NULL,"Exception CORBA","Command line",MB_ICONSTOP);
38 return(FALSE);
39 }
40
41 while (GetMessage(&msg, NULL, 0, 0))
42 {
43 TranslateMessage(&msg);
44 DispatchMessage(&msg);
45 }
46
47 delete tg;
48
49 return msg.wParam;
50 }
Line 11 : Create the Tango::Util singleton
Line 13-18 : Set parameters for the graphical interface
Line 20 : Initialize Tango device server requesting the display of the graphical interface
Line 22 : Run the device server
Line 25-39 : Display a message box for all the kinds of error during Tango device server initialization phase and exit WinMain function.
Line 41-45 : The Windows message loop
Line 47 : Delete the Tango::Util singleton. This class destructor unregisters the device server from the Tango database.
Remember that if the Tango device server graphical user interface is used, you must add the Tango windows resource file to your project.
If you don’t want to use the tango device server graphical user interface, do not use any parameter in the call of the server_init() method and do not link your device server with the Tango Windows resource file.
Device server as service
With Windows, if you want to have processes which survive to logoff sequence and/or are automatically started during computer startup sequence, you have to write them as service. It is possible to write Tango device server as service. You need to
Write a class which inherits from a pre-written Tango class called NTService. This class must have a start method.
Write a main function following a predefined skeleton.
The service class
It must inherits from the NTService class and defines a start method. The NTService class must be constructed with one argument which is the device server executable name. The start method has three arguments which are the number of arguments passed to the method, the argument list and a reference to an object used to log info in the NT event system. The first two args must be passed to the Tango::Util::init method and the last one is used to log error or info messages. The class definition file looks like
1 #include <tango.h>
2 #include <ntservice.h>
3
4 class MYService: public Tango::NTService
5 {
6 public:
7 MYService(char *);
8
9 void start(int,char **,Tango::NTEventLogger *);
10 };
Line 1-2 : Some include files
Line 4 : The MYService class inherits from Tango::NTService class
Line 7 : Constructor with one parameter
1 #include <myservice.h>
2 #include <tango.h>
3
4 using namespace std;
5
6 MYService::MYService(char *exec_name):NTService(exec_name)
7 {
8 }
9
10 void MYService::start(int argc,char **argv,Tango::NTEventLogger *logger)
11 {
12 Tango::Util *tg;
13 try
14 {
15 Tango::Util::_service = true;
16
17 tg = Tango::Util::init(argc,argv);
18
19 tg->server_init();
20
21 tg->server_run();
22 }
23 catch (bad_alloc)
24 {
25 logger->error("Can't allocate memory to store device object");
26 }
27 catch (Tango::DevFailed &e)
28 {
29 logger->error(e.errors[0].desc.in());
30 }
31 catch (CORBA::Exception &)
32 {
33 logger->error("CORBA Exception");
34 }
35 }
Line 6-8 : The MYService class constructor code.
Line 15 : Set to true the _service static variable of the Tango::Util class.
Line 17-21 : Classical Tango device server startup code
Line 23-34 : Exception management. Please, note that within a service. it is not possible to print data on a console. This method receives a reference to a logger object. This object sends all its output to the Windows event system. It is used to send messages when an exception has occurred.
The main function
The main function is used to create one instance of the class describing the service, to check the service option and to run the service. The code looks like :
1 #include <tango.h>
2 #include <MYService.h>
3
4 using namespace std;
5
6
7 int main(int argc,char *argv[])
8 {
9 MYService service(argv[0]);
10
11 int ret;
12 if ((ret = service.options(argc,argv)) <= 0)
13 return ret;
14
15 service.run(argc,argv);
16
17 return 0;
18 }
Line 9 : Create one instance of the MYService class with the executable name as parameter
Line 12 : Check service option with the options() method inherited from the NTService class.
Line 15 : Run the service. The run() method is inherited from the NTService class. This method will after some NT initialization sequence execute the user start() method.
Service options and messages
When a Tango device server is written as a Windows service, it supports several new options. These option are linked to Windows service usage.
Before it can be used, a service must be installed. A name and a title is associated to each service. For Tango device server used as service, the service name is build from the executable name followed by the underscore character and the instance name. For example, a device server service executable file named “opc” and started with “fluids” as instance name, will be named “opc_fluids”. The title string is built from the service executable name followed by the sentence “Tango device server” and the instance name between parenthesis. In the previous example, the service title will be “opc Tango device server (fluids)”. Once a service is installed, you can configure it with the “Services” application of the control panel. Services title are displayed by this application and allow the user to select one specific service. Once a service is selected, it is possible to start/stop it and to configure its startup type as manual (with the Services application) or as automatic. When the automatic mode is chosen, the service starts when the computer is started. In this case, the service executable code must resides on the computer local disk.
Tango device server logs message in the Windows event system when the service is started or stopped. You can see these messages with the “Event Viewer” application (Start->Programs->Administrative tools->Event Viewer) and choose the Application events.
The new options are -i, -s, -u, -h and -d.
-i : Install the service
-s : Install the service and choose the automatic startup mode
-u : Un-install the service
-dbg : Run in console mode to debug service. The service must have been installed prior to used it. The classical -v device server option can be used with the -d option.
On the command line, all these options must be used after the device server instance name (“opc fluids -i” to install the service, “opc fluids -u” to un-install the service, “opc fluids -v -d” to debug the service)
Tango device server using MFC as Windows service
If your Tango device server uses MFC and must be written as a Windows NT service, follow these rules :
Don’t forget to add the stdafx.h file as the first file included in all the source files making the project.
Comment out the definition of VC_EXTRALEAN in the stdafx.h file.
Change the pre-processor definitions, replace _WINDOWS by _CONSOLE
Add the /SUBSYSTEM:CONSOLE option in the linker options window of the project settings.
Add a call to initialize the MFC (AfxWinInit()) in the service main function
1 int main(int argc,char *argv[])
2 {
3 if (!AfxWinInit(::GetModuleHandle(NULL),NULL,::GetCommandLine(),0))
4 {
5 cerr << "Can't initialise MFC !" << endl;
6 return -1;
7 }
8
9 service serv(argv[0]);
10
11 int ret;
12 if ((ret = serv.options(argc,argv)) <= 0)
13 return ret;
14
15 serv.run(argc,argv);
16
17 return 0;
18 }
Line 3 : The MFC classes are initialized with the AfxWinInit() function call.
Compiling, linking and executing a TANGO device server process
Compiling and linking a C++ device server
On UNIX like operating system
Supported development tools
The supported compiler for Linux is gcc release 3.3 and above. Please, note that to debug a Tango device server running under Linux, gdb release 7 and above is needed in order to correctly handle threads.
Compiling
TANGO for C++ uses omniORB (release 4) [omniORB] as underlying CORBA Object Request Broker [OMG] and starting with Tango 8, the ZMQ library [ZMQ]. To compile a TANGO device server, your include search path must be set to :
The omniORB include directory
The ZMQ include directory
The Tango include directory
Your development directory
Linking
To build a running device server process, you need to link your code with several libraries:
The Tango library (called libtango)
Three omniORB package libraries (called libomniORB4, libomniDynamic4 and libCOS4)
The omniORB threading library (called libomnithread)
The ZMQ library (callled libzmq)
On top of that, you need additional libraries depending on the operating system :
For Linux, add the POSIX thread library (libpthread)
The following table summarizes the necessary options to compile a Tango C++ device server. Please, note that starting with Tango 8 and for gcc release 4.3 and later, some C++11 code has been used. This requires the compiler option -std=c++0x (or better). Obviously, the options -I and -L must be updated to reflect your file system organization.
Operating system |
Compiling option |
Linking option |
|---|---|---|
Linux gcc |
-D_REENTRANT -std=c++0x -I.. |
-L.. -ltango -lomniORB4 -lomniDynamic4 -lCOS4 -lomnithread -lzmq -lpthread |
The following is an example of a Makefile for Linux. Obviously, all the paths are set to the ESRF file system structure.
1 #
2 # Makefile to generate a Tango server
3 #
4
5 CC = c++
6 BIN_DIR = ubuntu1104
7 TANGO_HOME = /segfs/tango
8
9 INCLUDE_DIRS = -I $(TANGO_HOME)/include/$(BIN_DIR) -I .
10
11
12 LIB_DIRS = -L $(TANGO_HOME)/lib/$(BIN_DIR)
13
14
15 CXXFLAGS = -D_REENTRANT -std=c++0x $(INCLUDE_DIRS)
16 LFLAGS = $(LIB_DIRS) -ltango \
17 -lomniORB4 \
18 -lomniDynamic4 \
19 -lCOS4 \
20 -lomnithread \
21 -lzmq \
22 -lpthread
23
24
25 SVC_OBJS = main.o \
26 ClassFactory.o \
27 SteppermotorClass.o \
28 Steppermotor.o \
29 SteppermotorStateMachine.o
30
31
32 .SUFFIXES: .o .cpp
33 .cpp.o:
34 $(CC) $(CXXFLAGS) -c $<
35
36
37 all: StepperMotor
38
39 StepperMotor: $(SVC_OBJS)
40 $(CC) $(SVC_OBJS) -o $(BIN_DIR)/StepperMotor $(LFLAGS)
41
42 clean:
43 rm -f *.o core
Line 5-7 : Define Makefile macros
Line 9-10 : Set the include file search path
Line 12 : Set the linker library search path
Line 15 : The compiler option setting
Line 16-23 : The linker option setting
Line 26-30 : All the object files needed to build the executable
Line 33-35 : Define rules to generate object files
Line 38 : Define a “all” dependency
Line 40-41 : How to generate the StepperMotor device server executable
Line 43-44 : Define a “clean” dependency
On Windows using Visual Studio
Supported Windows compiler for Tango is Visual Studio 2008 (VC 9), Visual Studio 2010 (VC10) and Visual Studio 2013 (VC12). Most problems in building a Windows device server revolve around the /M compiler switch family. This switch family controls which run-time library names are embedded in the object files, and consequently which libraries are used during linking. Attempt to mix and match compiler settings and libraries can cause link error and even if successful, may produce undefined run-time behavior.
Selecting the correct /M switch in Visual Studio is done through a dialog box. To open this dialog box, click on the “Project” menu (once the correct project is selected in the Solution Explorer window) and select the “Properties” option. To change the compiler switch open the “C/C++” tree and select “Code Generation”. The following options are supported.
Multithreaded = /MT
Multithreaded DLL = /MD
Debug Multithreaded = /MTd
Debug Multithreaded DLL = /MDd
Compiling a file with a value of the /M switch family will impose at link phase the use of libraries also compiled with the same value of the /M switch family. If you compiled your source code with the /MT option (Multithreaded), you must link it with libraries also compiled with the /MT option.
On both 32 or 64 bits computer, omniORB and TANGO relies on the preprocessor identifier WIN32 being defined in order to configure itself. If you build an application using static libraries (option /MT or /MTd), you must add _WINSTATIC to the list of the preprocessor identifiers. If you build an application using DLL (option /MD or /MDd), you must add LOG4TANGO_HAS_DLL and TANGO_HAS_DLL to the list of preprocessor identifiers.
To build a running device server process, you need to link your code with several libraries on top of the Windows libraries. These libraries are:
The Tango library (called tango.lib or tangod.lib for debug mode)
- The omniORB package libraries (see next table)
Compile mode |
Libraries |
|---|---|
Debug Multithreaded |
omniORB4d.lib, omniDynamic4d.lib, omnithreadd.lib and COS4d.lib |
Multithreaded |
omniORB4.lib, omniDynamic4.lib, omnithread.lib and COS4.lib |
Debug Multithreaded DLL |
omniORB420_rtd.lib, omniDynamic420_rtd.lib, omnithread40_rtd.lib, and COS420_rtd.lib |
Multithreaded DLL |
omniORB420_rt.lib, omniDynamic420_rt.lib, omnithread40_rt.lib and COS420_rt.lib |
The ZMQ library (zmq.lib or zmqd.lib for debug mode)
Windows network libraries (mswsock.lib and ws2_32.lib)
Windows graphic library (comctl32.lib)
To add these libraries in Visual Studio, open the project property pages dialog box and open the “Link” tree. Select “Input” and add these library names to the list of library in the “Additional Dependencies” box.
The “Win32 Debug” or “Win32 Release” configuration that you change within the Configuration Manager window changes the /M switch compiler. For instance, if you select a “Win32 Debug” configuration in a non-DLL project, use the omniORB4d.lib, omniDynamic4d.lib and omnithreadd.lib libraries plus the tangod.lib and zmqd.lib libraries. If you select the “Win32 Release” configuration, use the omniORB4.lib, omniDynamic4.lib and omnithread.lib libraries plus the tango.lib and zmq.lib libraries.
WARNING: In some cases, the Microsoft Visual Studio wizard used during project creation generates one include file called Stdafx.h. If this file itself includes windows.h file, you have to add the preprocessor macro _WIN32_WINNT and set it to 0x0500.
Running a C++ device server
To run a C++ Tango device server, you must set an environment variable. This environment variable is called TANGO_HOST and has a fixed syntax which is
TANGO_HOST=<host>:<port>
The host field is the host name where the TANGO database device server is running. The port field is the port number on which this server is listening. For instance, a valid syntax is TANGO_HOST=dumela:10000. For UNIX like operating system, setting environment variable is possible with the export or setenv command depending on the shell used. For Windows, setting environment variable is possible with the “Environment” tab of the “System” application in the control panel.
If you need to start a Tango device server on a pre-defined port (For Tango database device server or device server without database usage), you must use one of the underlying ORB option endPoint like
myserver myinstance_name -ORBendPoint giop:tcp::<port number>
Advanced programming techniques
The basic techniques for implementing device server pattern are required by each device server programmer. In certain situations, it is however necessary to do things out of the ordinary. This chapter will look into programming techniques which permit the device server serve more than simply the network.
Receiving signal
It is UNSAFE to use any CORBA call in a signal handler. It is also UNSAFE to use some system calls in a signal handler. Tango device server solved this problem by using threads. A specific thread is started to handle signals. Therefore, every Tango device server is automatically a threaded process. This allows the programmer to write the code which must be executed when a signal is received as ordinary code. All device server threads masks all signals except the specific signal thread which is permanently waiting for signal. If a signal is sent to a device server process, only the signal thread will receive it because it is the single thread which does not mask signals.
Nevertheless, signal management is not trivial and some care have to be taken. The signal management differs from operating system to operating system. It is not recommended that you install your own signal routine using any of the signal routines provided by the operating system calls or library.
Using signal
It is possible for C++ device server to receive signals from drivers or other processes. The TDSOM supports receiving signal at two levels: the device level and the class level. Supporting signal at the device level means that it is possible to specify interest into receiving signal on a device basis. This feature is supported via three methods defined in the DeviceImpl class. These methods are called register_signal, unregister_signal and signal_handler.
The *register_signal* method has one parameter which is the signal number. This method informs the device server signal system that the device want to be informed when the signal passed as parameter is received by the process. There is a special case for Linux as explained in the previous sub-chapter. It is possible to register a signal to be executed in the a signal handler context (with all its restrictions). This is done with a second parameter to this register_signal method. This second parameter is simply a boolean data. If it is true, the signal_handler will be executed in a signal handler context in the device server main thread. A default value (false) has been defined for this parameter.
The *unregister_signal* method also have an input parameter which is the signal number. This method removes the device from the list of object which should be warned when the signal is received by the process.
The *signal_handler* method is the method which is triggered when a signal is received if the corresponding register_signal has been executed. This method is defined as virtual and can be redefined by the user. It has one input argument which is the signal number.
The same three methods also exist in the DeviceClass class. Their action and their usage are similar to the DeviceImpl class methods. Installing a signal at the class level does not mean that all the device belonging to this class will receive the signal. This only means that the signal_handler method of the DeviceClass instance will be executed. This is useful if an action has to be executed once for a class of devices when a signal is received.
The following code is an example with our stepper motor device server configured via the database to serve three motors. These motors have the following names : id04/motor/01, id04/motor/02 and id04/motor/03. The signal SIGALRM (alarm signal) must be propagated only to the motor number 2 (id04/motor/02)
1 void StepperMotor::init_device()
2 {
3 cout << "StepperMotor::StepperMotor() create motor " << dev_name << endl;
4
5 long i;
6
7 for (i=0; i< AGSM_MAX_MOTORS; i++)
8 {
9 axis[i] = 0;
10 position[i] = 0;
11 direction[i] = 0;
12 }
13
14 if (dev_name == "id04/motor/02")
15 register_signal(SIGALRM);
16 }
17
18 StepperMotor::~StepperMotor()
19 {
20 unregister_signal(SIGALRM);
21 }
22
23 void StepperMotor::signal_handler(long signo)
24 {
25 INFO_STREAM << "Inside signal handler for signal " << signo << endl;
26
27 // Do what you want here
28
29 }
The init_device method is modified.
Line 14-15 : The device name is checked and if it is the correct name, the device is registered in the list of device wanted to receive the SIGALARM signal.
The destructor is also modified
Line 20 : Unregister the device from the list of devices which should receives the SIGALRM signal. Note that unregister a signal for a device which has not previously registered its interest for this signal does nothing.
The signal_handler method is redefined
Line 25 : Print signal number
Line 27 : Do what you have to do when the signal SIGALRM is received.
If all devices must be warned when the device server process receives the signal SIGALRM, removes line 14 in the init_device method.
Exiting a device server gracefully
A device server has to exit gracefully by unregistering itself from the database. The necessary action to gracefully exit are automatically executed on reception of the following signal :
SIGINT, SIGTERM and SIGQUIT for device server running on Linux
SIGINT, SIGTERM, SIGABRT and SIGBREAK for device server running on Windows
This does not prevents device server to also register interest at device or class levels for those signals. The user installed signal_handler method will first be called before the graceful exit.
Inheriting
This sub-chapter details how it is possible to inherit from an existing device pattern implementation. As the device pattern includes more than a single class, inheriting from an existing device pattern needs some explanations.
Let us suppose that the existing device pattern implementation is for devices of class A. This means that classes A and AClass already exists plus classes for all commands offered by device of class A. One new device pattern implementation for device of class B must be written with all the features offered by class A plus some new one. This is easily done with the inheritance. Writing a device pattern implementation for device of class B which inherits from device of class A means :
Write the BClass class
Write the B class
Write B class specific commands
Eventually redefine A class commands
The miscellaneous code fragments given below detail only what has to be updated to support device pattern inheritance
Writing the BClass
As you can guess, BClass has to inherit from AClass. The command_factory method must also be adapted.
1 namespace B
2 {
3
4 class BClass : public A::AClass
5 {
6 .....
7 }
8
9 BClass::command_factory()
10 {
11 A::AClass::command_factory();
12
13 command_list.push_back(....);
14 }
15
16 } /* End of B namespace */
Line 1 : Open the B namespace
Line 4 : BClass inherits from AClass which is defined in the A namespace.
Line 11 : Only the command_factory method of the BClass will be called at start-up. To create the AClass commands, the command_factory method of the AClass must also be executed. This is the reason of the line
Line 13 : Create BClass commands
Writing the B class
As you can guess, B has to inherits from A.
1 namespace B
2 {
3
4 class B : public A:A
5 {
6 .....
7 };
8
9 B::B(Tango::DeviceClass *cl,const char *s):A::A(cl,s)
10 {
11 ....
12 init_device();
13 }
14
15 void B::init_device()
16 {
17 ....
18 }
19
20 } /* End of B namespace */
Line 1 : Open the B namespace.
Line 4 : B inherits from A which is defined in the A namespace
Line 9 : The B constructor calls the right A constructor
Writing B class specific command
Noting special here. Write these classes as usual
Redefining A class command
It is possible to redefine a command which already exist in class A only if the command is created using the inheritance model (but keeping its input and output argument types). The method which really execute the class A command is a method implemented in the A class. This method must be defined as virtual. In class B, you can redefine the method executing the command and implement it following the needs of the B class.
Using another device pattern implementation within the same server
It is often necessary that inside the same device server, a method executing a command needs a command of another class to be executed. For instance, a device pattern implementation for a device driven by a serial line class can use the command offered by a serial line class embedded within the same device server process. To execute one of the command (or any other CORBA operations/attributes) of the serial line class, just call it as a normal client will do by using one instance of the DeviceProxy class. The ORB will recognize that all the devices are inside the same process and will execute calls as a local calls. To create the DeviceProxy class instance, the only thing you need to know is the name of the device you gave to the serial line device. Retrieving this could be easily done by a Tango device property. The DeviceProxy class is fully described in Tango Application Programming Interface (API) reference WEB pages
Device pipe
What a Tango device pipe is has been defined in the Chapter 3 about device server model. How you read or write a pipe in a client software is documented in chapter 4 about the Tango API. In this section, we describe how you can read/write into/from a device pipe on the server side (In a Tango class with pipe).
Client reading a pipe
When a client reads a pipe, the following methods are executed in the Tango class:
The always_executed_hook() method.
A method called is_<pipe_name>_allowed(). The rule of this method is to allow (or disallow) the next method to be executed. It is usefull for device with some pipes which can be read only in some precise conditions. It has one parameter which is the request type (read or write)
A method called read_<pipe_name>(). The aim of this method is to store the pipe data in the pipe object. It has one parameter which is a reference to the Pipe object to be read.
The figure 6.8 is a drawing of these method calls sequencing for our class StepperMotor with one pipe named DynData.
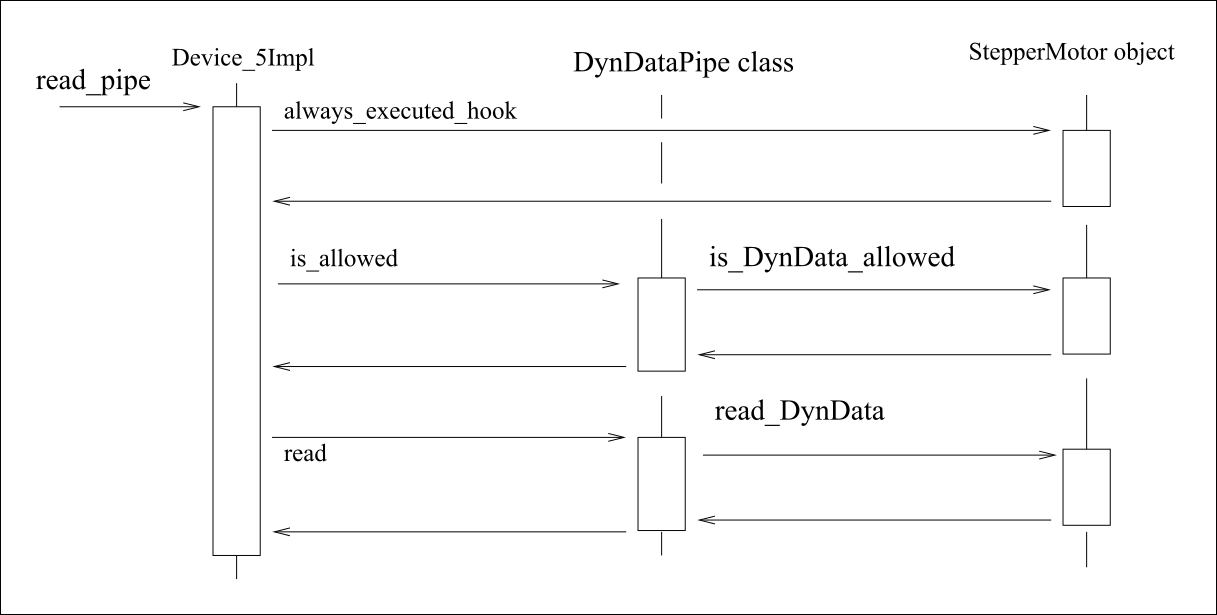
Figure 6.8: Read pipe sequencing
The class DynDataPipe is a simple class which follow the same skeleton from one Tango class to another. Therefore, this class is generated by the Tango code generator Pogo and the Tango class developper does not have to modify it. The method is_DynData_allowed() is relatively simple and in most cases the default code generated by Pogo is enough. The method read_DynData() is the method on which the Tango class developper has to concentrate on. The following code is one example of these two methods.
1 bool StepperMotor::is_DynData_allowed(Tango::PipeReqType req)
2 {
3 if (get_state() == Tango::ON)
4 return true;
5 else
6 return false;
7 }
8
9 void StepperMotor::read_DynData(Tango::Pipe &pipe)
10 {
11 nb_call++;
12 if (nb_call % 2 == 0)
13 {
14 pipe.set_root_blob_name("BlobCaseEven");
15
16 vector<string> de_names {"EvenFirstDE","EvenSecondDE"};
17 pipe.set_data_elt_names(de_names);
18
19 dl = 666;
20 v_db.clear();
21 v_db.push_back(1.11);
22 v_db.push_back(2.22);
23
24 pipe << dl << v_db;
25 }
26 else
27 {
28 pipe.set_root_blob_name("BlobCaseOdd");
29
30 vector<string> de_names {"OddFirstDE"};
31 pipe.set_data_elt_names(de_names);
32
33 v_str.clear();
34 v_str.push_back("Hola");
35 v_str.push_back("Salut");
36 v_str.push_back("Hi");
37
38 pipe << v_str;
39 }
40 }
The is_DynData_allowed method is defined between lines 1 and 7. It is allowed to read or write the pipe only is the device state is ON. Note that the input parameter req is not used. The parameter allows the user to know the type of request. The data type PipeReqType is one enumeration with two possible values which are READ_REQ and WRITE_REQ.
The read_DynData method is defined between lines 9 and 40. If the number of times this method has been called is even, the pipe contains two data elements. The first one is named EvenFirstDE and its data is a long. The second one is named EvenSecondDE and its data is an array of double. If the number of call is odd, the pipe contains only one data element. Its name is OddFirstDe and its data is an array of strings. Data are inserted into the pipe at lines 24 and 38. The variables nb_call, dl, v_db and v_str are device data member and therefore declare in the .h file. Refer to pipe section in chapter 3 and to the API reference documentation (in Tango WEB pages) to learn more on how you can insert data into a pipe and to know how data are organized within a pipe.
Client writing a pipe
When a client writes a pipe, the following methods are executed in the Tango class:
The always_executed_hook() method.
A method called is_<pipe_name>_allowed(). The rule of this method is to allow (or disallow) the next method to be executed. It is usefull for device with some pipes which can be read only in some precise conditions. It has one parameter which is the request type (read or write)
A method called write_<pipe_name>(). It has one parameter which is a reference to the WPipe object to be written. The aim of this method is to get the data to be written from the WPipe oject and to write them into the corresponding Tango class objects.
The figure 6.9 is a drawing of these method calls sequencing for our class StepperMotor with one pipe named DynData.
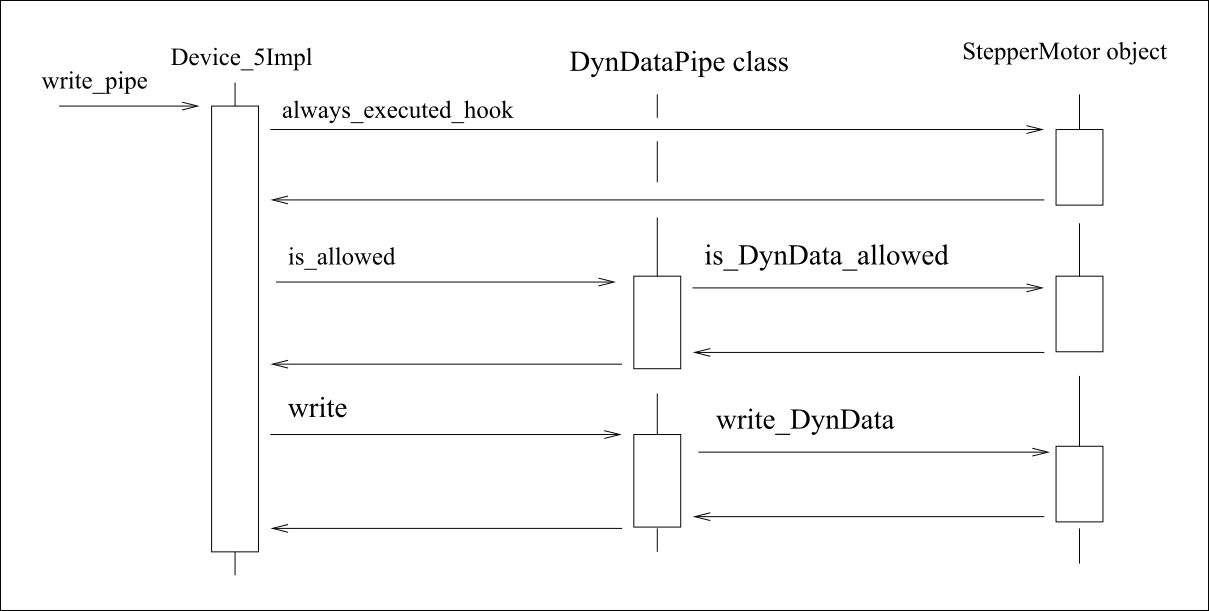
Figure 6.9: Write pipe sequencing
The class DynDataPipe is a simple class which follow the same skeleton from one Tango class to another. Therefore, this class is generated by the Tango code generator Pogo and the Tango class developper does not have to modify it. The method is_DynData_allowed() is relatively simple and in most cases the default code generated by Pogo is enough. The method write_DynData() is the method on which the Tango class developper has to concentrate on. The following code is one example of the write_DynData() method.
1 void StepperMotor::write_DynData(Tango::WPipe &w_pipe)
2 {
3 string str;
4 vector<float> v_fl;
5
6 w_pipe >> str >> v_fl;
7 .....
8 }
In this example, we know that the pipe will always contain a srting followed by one array of float. On top of that, we are not niterested by the
data element names. Data are extracted from the pipe at line 6 and are available for further use starting at line 7. If the content of the pipe is not a string followed by one array of float, the data extraction line (6) will throw one exception which will be reported to the client who has tried to write the pipe. Refer to pipe section in chapter 3 and to the API reference documentation (in Tango WEB pages) to learn more on how you can insert data into a pipe and to know how data are organized within a pipe.
- 1
The default is_allowed method behavior is to always allows the command
- 2
URL stands for Uniform Resource Locator
- 3
The StepperMotor class inherits from the DeviceImpl class and therefore is a DeviceImpl
- 4
The StepperMotorClass inherits from the DeviceClass and therefore is a DeviceClass
- 5
It can also be data declared as object data members or memory declared as static